

当前工业机器人、服务机器人的智能化升级进程持续加快,抓取、操作类场景作为机器人落地应用的核心高频场景,其算法训练高度依赖细分场景下的高质量标注数据集——尤其是同时覆盖视觉观测与机械臂运动状态的同步数据,是提升端到端操控模型精度的核心基础。此前业内多数公开抓取数据集要么仅覆盖单一视角视觉数据,要么缺乏机械臂运动的同步状态标注,难以支撑复杂场景下的算法研发需求。
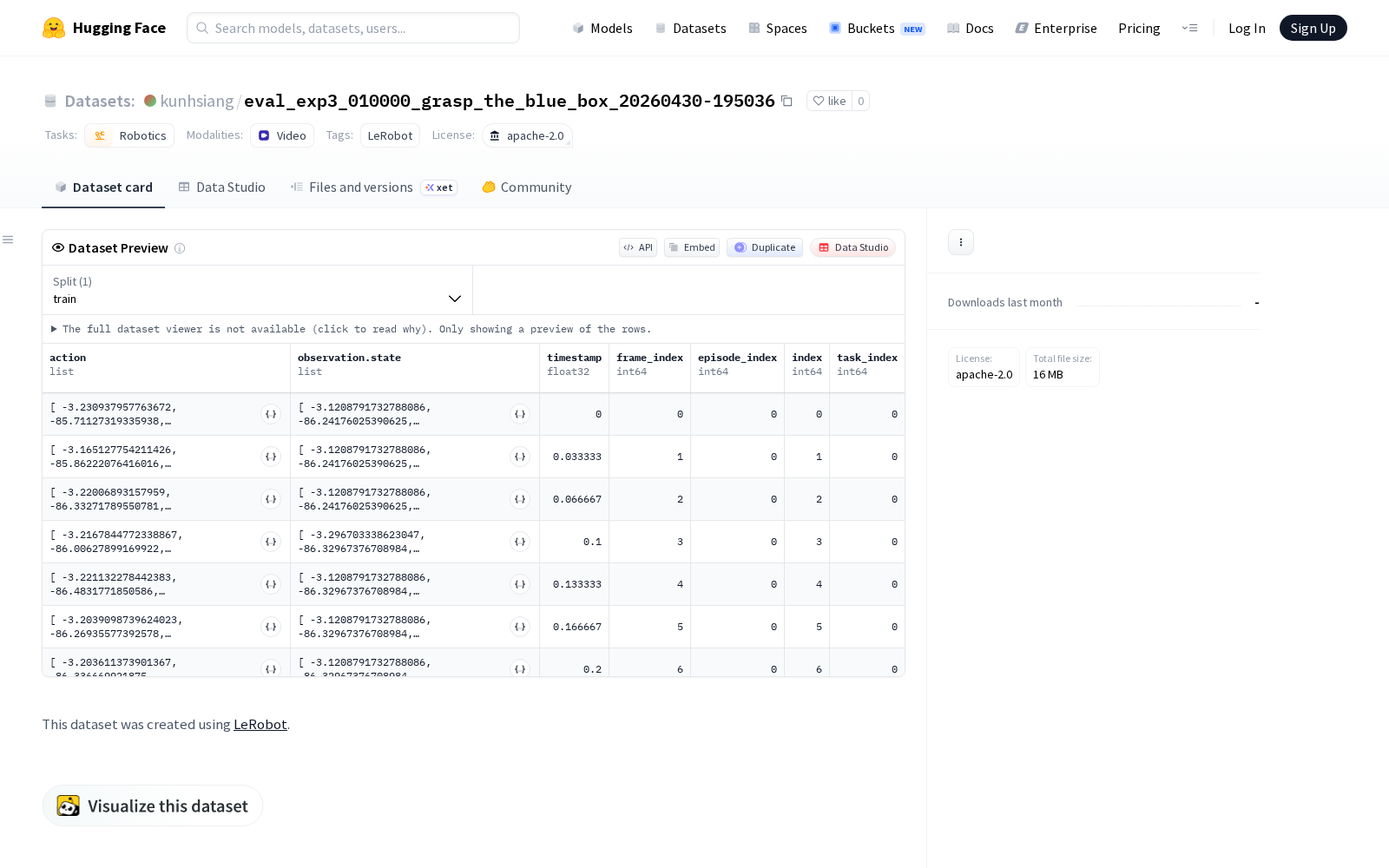
kunhsiang本次发布的数据集eval_exp3_010000_grasp_the_blue_box_20260430-195036由LeRobot创建,主要面向机器人技术研发领域开放。该数据集共包含1项蓝色箱体抓取任务,覆盖730帧同步采集数据,采集帧率为30fps,其中结构化数据文件大小为100MB,配套视频文件大小为200MB。数据维度全面覆盖机器人抓取作业的全链路特征:动作层包含6个关节的实时位置数据,观察层同步收录6个关节的运行状态数据,同时配套前视、顶部、夹爪三个视角的480x640分辨率三通道图像,此外还包含完整的时间戳、帧索引、集索引、索引和任务索引体系,可满足不同维度的算法训练调用需求。数据集采用apache-2.0开源许可证,支持科研机构、商业主体免费用于研发与落地项目,授权门槛友好。
从应用场景来看,该数据集聚焦蓝色标准化箱体这一工业仓储、物流分拣场景中的高频载具,可广泛应用于多个研发方向:首先可用于工业分拣场景的机器人抓取算法训练,多视角的图像数据可模拟真实作业环境中不同站位的观测角度,帮助算法降低视角偏差带来的抓取失误率;其次可支撑机械臂运动控制算法研发,同步的关节状态与视觉数据可支撑从视觉识别到运动路径规划的端到端模型训练,优化机械臂运动轨迹、降低碰撞风险;此外还可用于机器人仿真测试场景,依托完整的索引体系可快速生成标准化测试用例,减少真机调试的时间与成本,也可作为职业教育领域机器人操控课程的配套实训素材。该数据集的发布也填补了蓝色标准化箱体抓取细分场景的同步数据空白,对完善AI训练数据要素供给体系、降低机器人操控领域研发门槛有积极意义。
查看eval_exp3_010000_grasp_the_blue_box_20260430-195036
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)