

随着具身智能与工业机器人产业的快速发展,高质量、多模态的标注运动数据集已经成为机器人控制算法迭代的核心基础资源,当前行业普遍面临细分场景数据覆盖不足、模态同步性差、标注标准不统一的痛点,直接制约了通用机器人操作技术的落地效率。近日,研究员KoukiHagiwara正式对外发布slide_push_pull_v3数据集,该数据集由LeRobot创建,首发上线HuggingFace平台,面向全球机器人领域研究者开放使用。
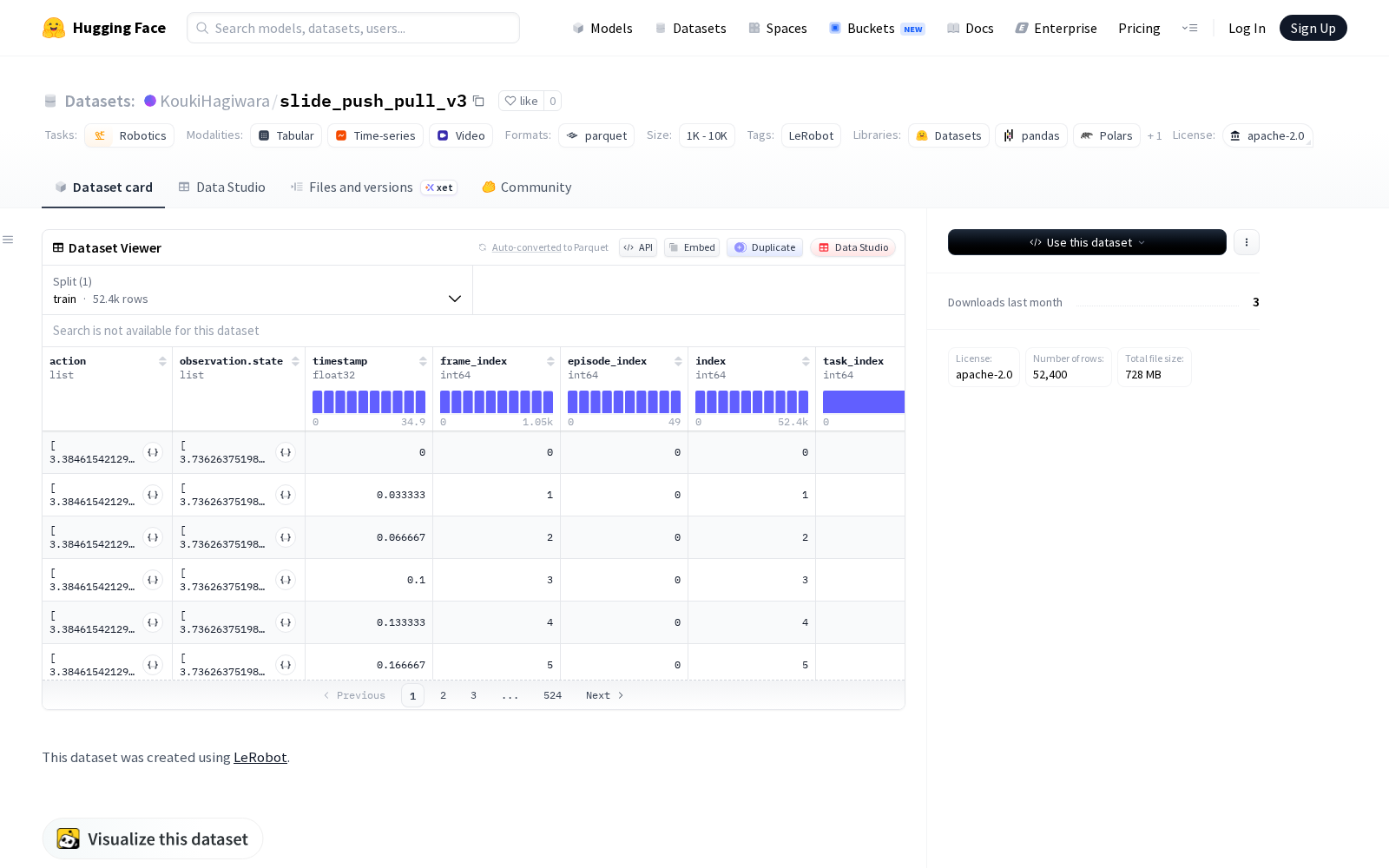
据公开信息显示,slide_push_pull_v3数据集共包含50个episodes,总计52400帧采集内容,采集帧率为30fps,存储格式覆盖parquet结构化数据格式与mp4视频格式,其中结构化数据文件总大小为100MB,视频文件总大小为200MB,轻量化的存储设计便于研发团队快速下载部署,降低前期数据处理成本。
从数据维度来看,该数据集同步覆盖多类核心标注信息:动作维度包含6个关节位置的指令数据,观测状态维度包含6个关节位置的实时反馈数据,同时配套顶部摄像头、腕部摄像头两路视频采集数据(分辨率480x640,3通道),以及时间戳、帧索引、episode索引等完整元数据信息,多模态数据的严格对齐为算法训练提供了标准化的输入基础。
从应用价值来看,该数据集可广泛应用于机器人领域多个核心研发方向:在机器人操作控制场景下,研究者可基于滑动、推、拉三类典型末端操作的全链路数据,训练机械臂轨迹规划、力控适配算法,提升机器人在工业分拣、零部件装配、服务场景搬运等场景的操作精准度;在关节运动分析场景下,同步的指令动作数据与实际观测数据可支撑关节运动误差校准、磨损预判算法的研发,降低机械臂长期运行后的参数漂移问题,提升设备运行稳定性;此外,同步的视觉数据与关节状态数据还可用于多模态具身智能模型的训练,支撑机器人通过视觉反馈自主调整关节运动参数,强化复杂非结构化场景下的自主决策能力。
作为机器人运动控制领域的细分基准数据集,slide_push_pull_v3的发布也为相关技术的横向对比提供了统一的测试标准,有助于降低中小研发团队的数据获取门槛,推动机器人控制领域的技术普惠与迭代效率。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)