

随着具身智能产业进入快速落地期,高质量场景化标注数据集已成为支撑机器人视觉感知、动作控制模型迭代的核心生产要素。其中面向家用服务场景的细粒度操作数据集,因采集成本高、标注维度复杂一直是行业稀缺资源,直接制约了家用服务机器人高频任务的落地效率。近日,科技数据机构fecasado正式发布toast1-to-plate-multi-320x240数据集,该数据集由LeRobot创建,于2026年5月2日首发于HuggingFace平台,主要面向机器人技术研发领域开放。
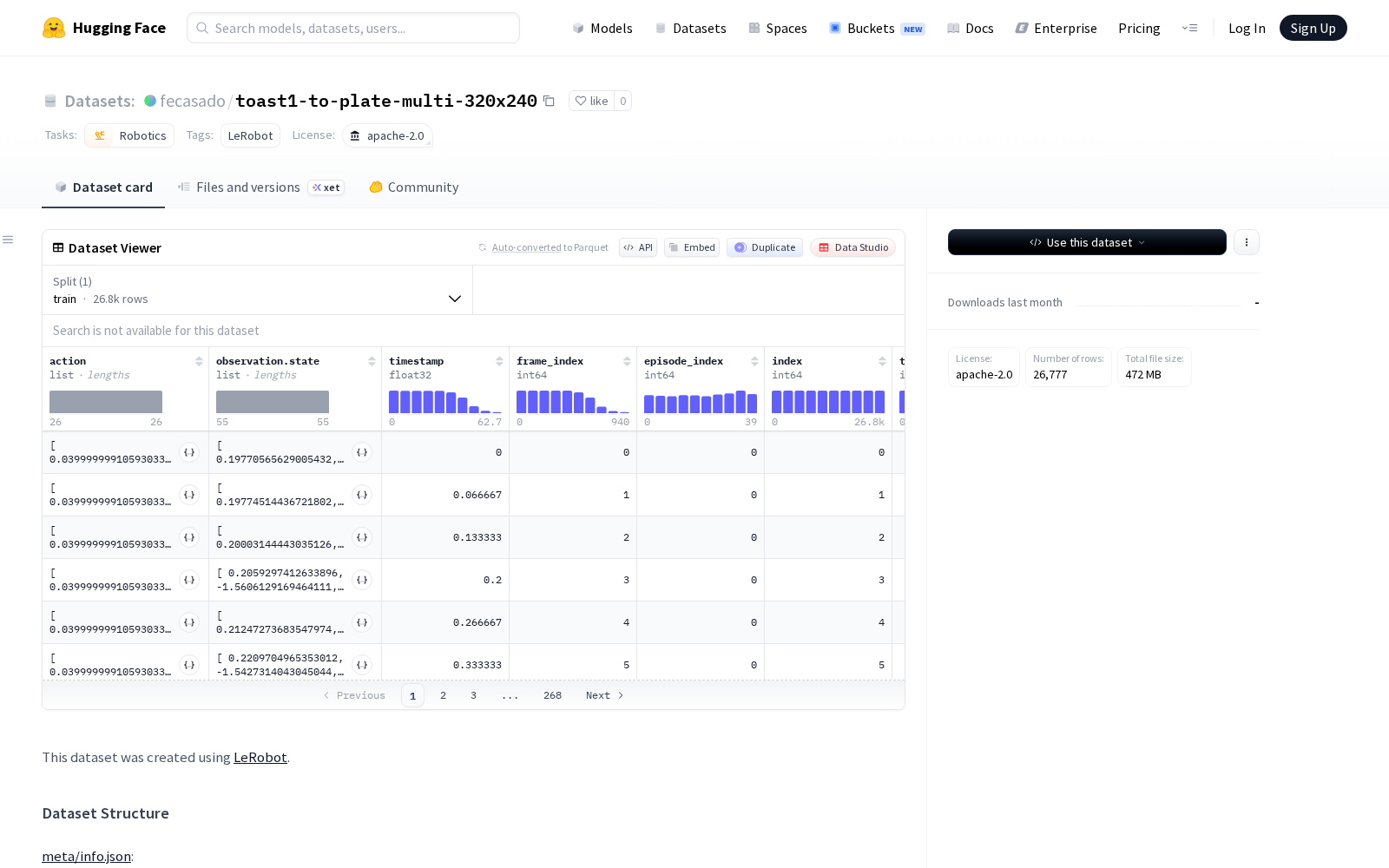
据公开参数显示,该数据集围绕“将吐司放到盘子中”这一家用场景核心任务展开,共包含40个采集片段、26777帧有效数据,总数据文件大小100MB、配套视频文件大小200MB,采集帧率为15fps,许可证为apache-2.0,支持开发者自由修改与商用使用,大幅降低中小研发团队的数据获取成本。从数据结构来看,该数据集覆盖动作、观察状态、图像三大核心维度,其中动作维度包含26个浮点型数据,可用于训练机器人关节运动控制、抓取路径规划模型;观察状态维度包含55个浮点型数据,可支撑机器人环境感知、任务进度判断能力的训练;图像维度则覆盖左视角、右视角、用户视角、用户视线四大视角的视频图像数据,可用于多模态视觉识别、用户意图预判等方向的模型训练。
从应用场景来看,该数据集除了可直接支撑家用服务机器人完成吐司递送、早餐制备等相关任务的研发外,其多维度标注结构也可迁移到桌面整理、物品递送、食材分拣等同类家用抓取操作场景,同时也可为工业协作机器人的轻小物料转运、柔性装配等任务的模型预训练提供参考数据,对推动具身智能技术从实验室走向民用、工业场景具有实际价值。
查看toast1-to-plate-multi-320x240
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)