

随着具身智能成为下一代人工智能的核心研发方向,标准化、高复用性的机器人操作数据集已经成为制约行业研发效率的核心瓶颈。当前全球机器人学习领域普遍存在数据集格式碎片化、标注标准不统一、场景覆盖不全等问题,不同团队产出的数据集往往需要经过大量清洗、格式转换工作才能适配训练框架,大幅拉高了研发门槛。作为全球最大的AI开源社区之一,HuggingFace推出的LeRobot格式是当前机器人学习领域的主流通用数据规范,通过统一多模态观测数据、动作标签、机器人状态参数等数据的存储结构,大幅降低不同团队数据集的适配成本,减少研发过程中的数据预处理工作量,加速算法迭代效率。
近日,开发者ykorkmaz正式在HuggingFace平台首发全新机器人数据集play_single_robot_2,该数据集严格遵循LeRobot格式规范,是当前面向单机器人通用操作场景的稀缺标准化数据集之一。
从数据集的定位来看,play_single_robot_2可覆盖多类机器人研发场景的训练需求:可用于家用服务机器人的物品抓取、空间移动、简单家务执行等任务的算法优化,也可为工业场景小型机械臂的柔性操作、定点作业训练提供数据支撑,同时还能作为具身智能通用模型小样本学习、迁移能力验证的基准数据集,帮助研究人员降低数据采集和格式转换的研发成本。
该数据集的发布进一步丰富了LeRobot生态的单机器人场景数据储备,对于推动机器人学习领域的跨团队协作、降低具身智能技术的研发门槛具有积极意义,也为后续更多细分场景的标准化机器人数据集产出提供了参考。
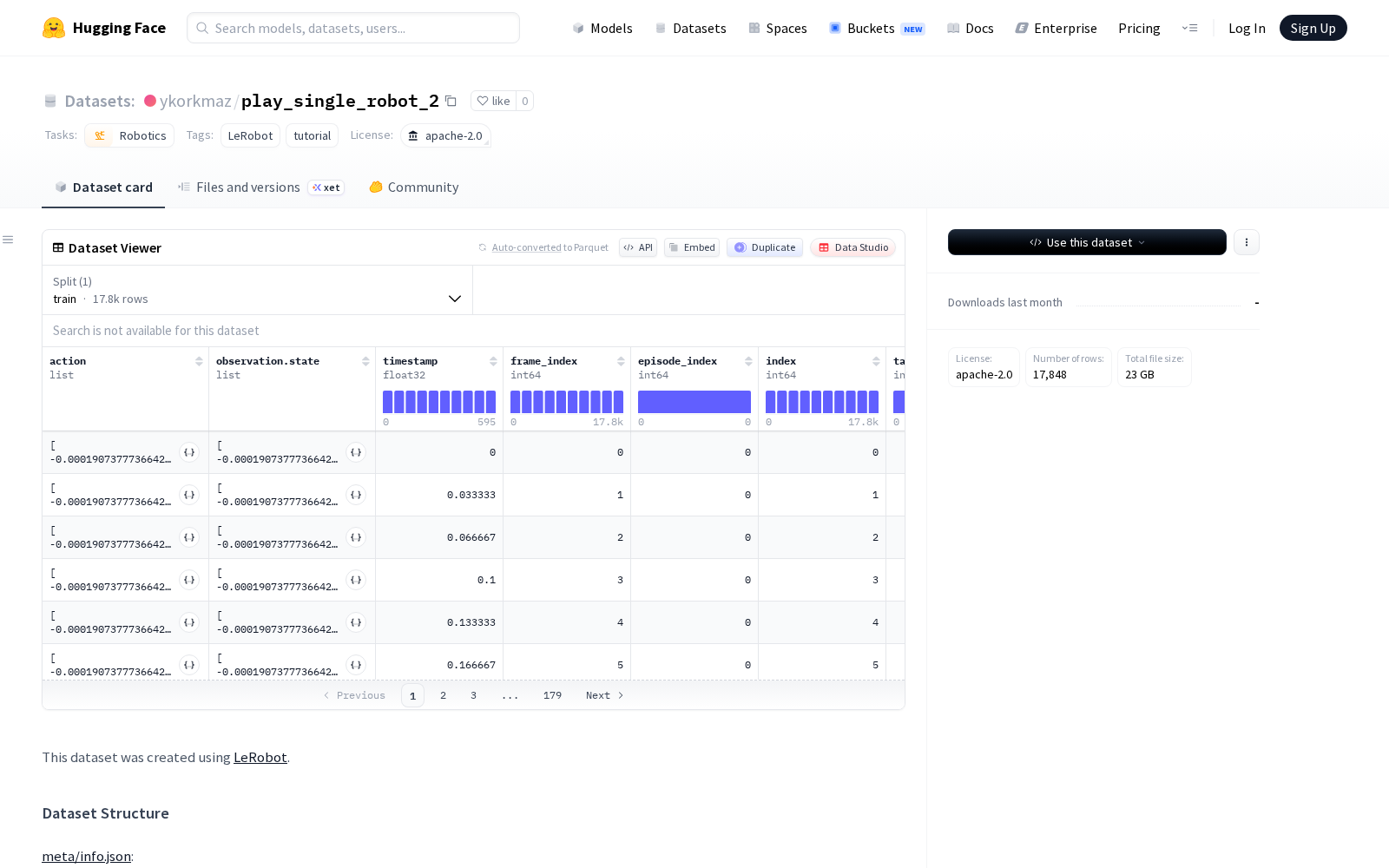
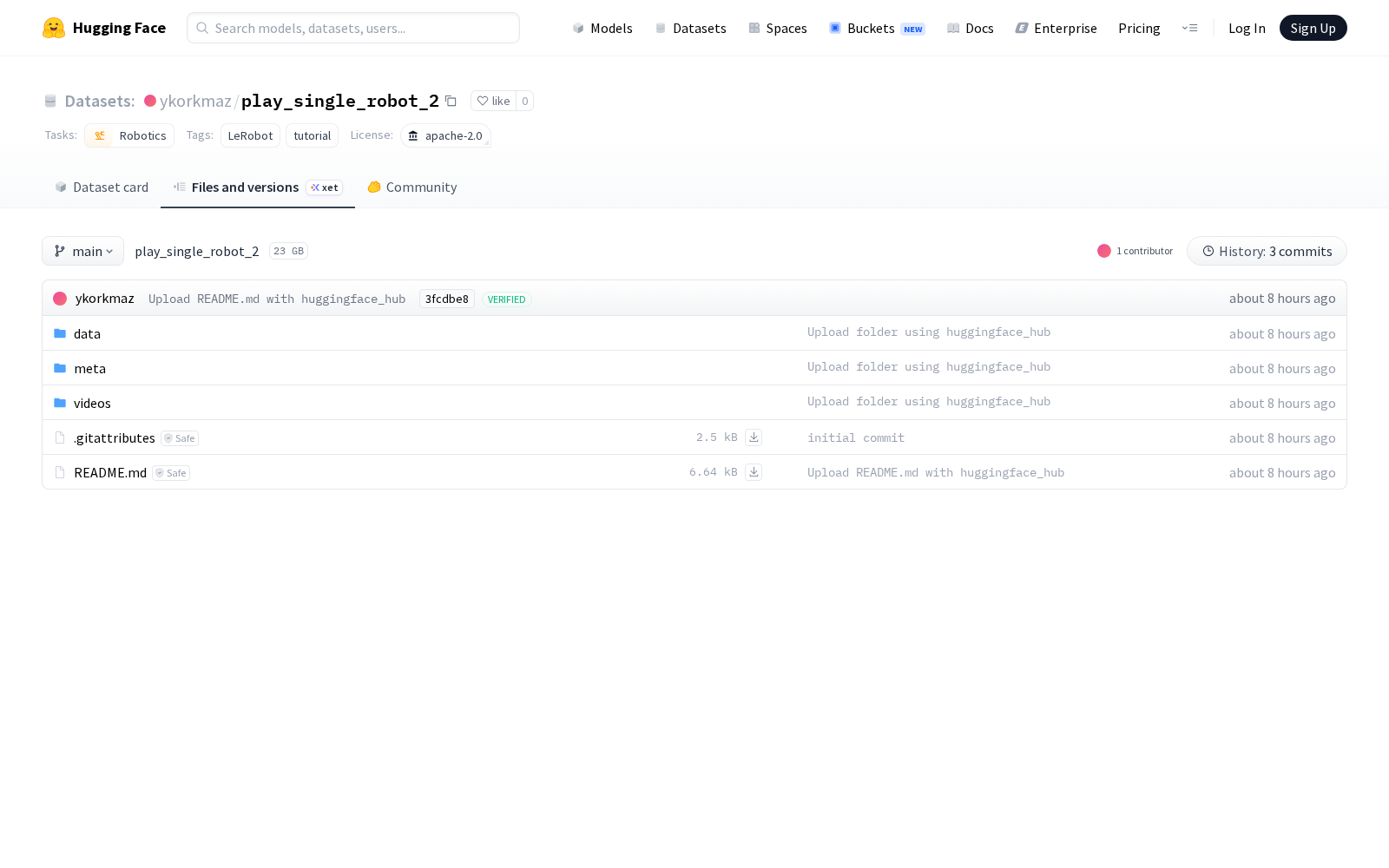
ykorkmaz本次发布的数据集play_single_robot_2,该数据集为HuggingFace LeRobot格式机器人数据集。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)