

具身智能作为人工智能下一阶段的核心发展方向,近年来持续获得产业界与科研领域的重点投入,而标准化的场景数据集是算法训练、效果评估的核心基础设施,直接影响研发效率与技术落地速度。作为全球机器人学习领域的顶级学术会议,CoRL(Conference on Robot Learning)长期推动机器人领域的数据集标准化建设,其旗下CSI专项的成果已成为全球机器人研发团队的重要参考依据。2026年5月2日,CoRL2026-CSI正式对外发布首款SO101系列场景基准数据集,首发上线HuggingFace开源平台面向全球开发者开放。
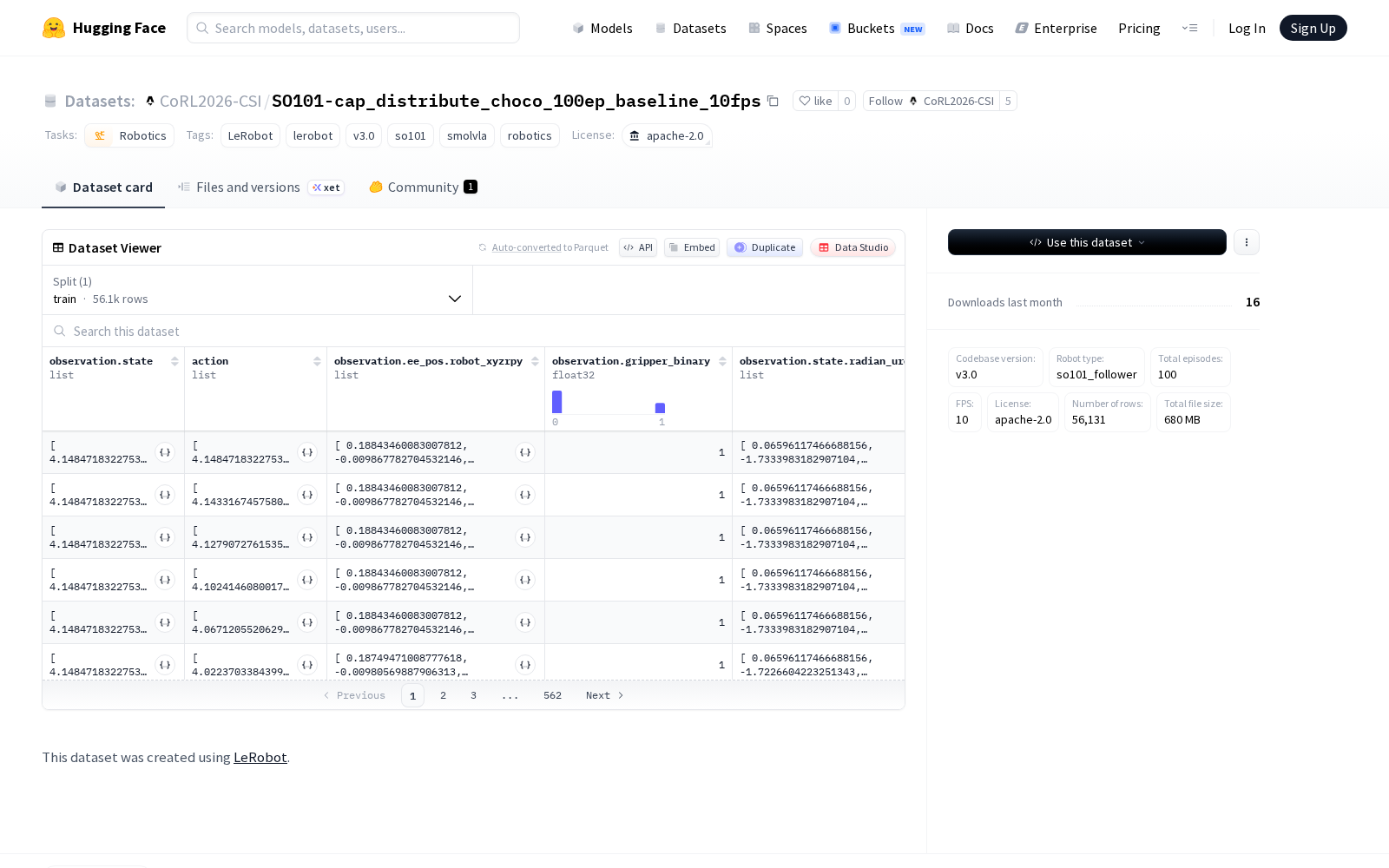
CoRL2026-CSI本次发布的数据集SO101-cap_distribute_choco_100ep_baseline_10fps,该数据集使用LeRobot创建,LeRobot是HuggingFace推出的专为具身智能研发打造的开源工具栈,支持多类型机器人的数据集采集、模型训练与仿真验证。本次发布数据集的核心参数为:代码库版本v3.0;适配机器人类型为so101_follower人形机器人;总动作片段数100;采样帧率10fps;许可证为apache-2.0,支持各类研发主体免费用于非商业及商业场景的二次开发与使用。
查看SO101-cap_distribute_choco_100ep_baseline_10fps
作为面向物品分发场景的标准化baseline数据集,该数据集可支撑多个具身智能研发方向的技术迭代:一是可作为人形机器人精细操作算法的训练数据源,覆盖小体积物品抓取、姿态调整、精准递送等核心动作的模型训练;二是可作为通用具身智能算法的基准测试集,统一不同研发团队的算法效果评估维度,降低行业横向对比的成本;三是可用于Sim2Real(仿真到真实场景迁移)技术的验证,帮助研发团队在仿真环境中完成算法初步验证后,快速适配真实机器人的操作逻辑,减少真实场景调试的耗材与时间成本。
当前人形机器人产业化正处于从实验室走向商用场景的关键节点,末端执行器的操作精度、稳定性是决定其能否落地服务场景、工业场景的核心指标,该类细分场景开源基准数据集的发布,将有效降低中小研发团队的数据集构建门槛,推动具身智能领域的技术普惠,加速服务机器人、工业机器人等多个赛道的落地进程。
Dataset card内容:
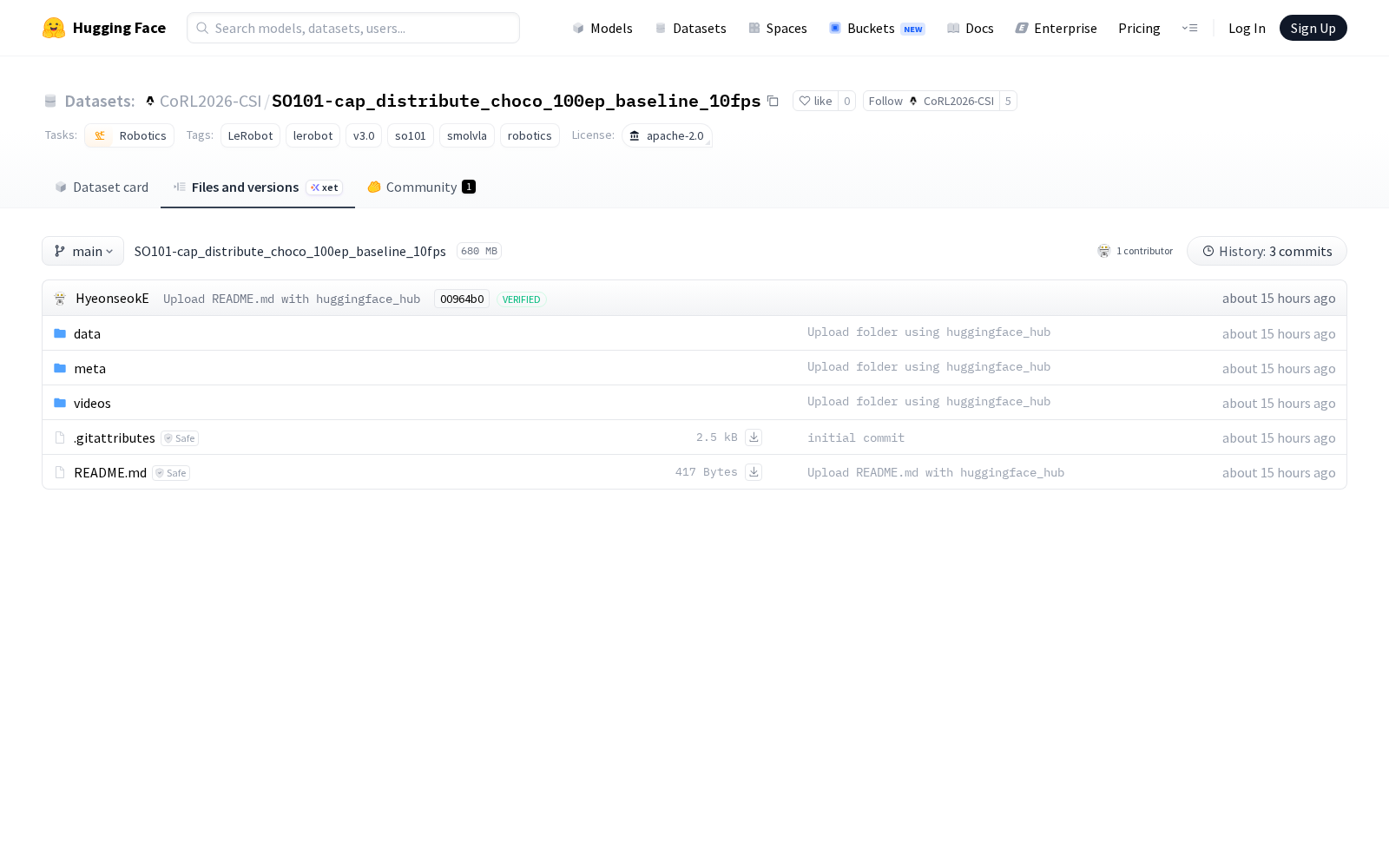
Files and versions内容:



_1769672084863.jpg)