

随着具身智能与服务机器人产业进入规模化落地期,细粒度操作场景的训练数据稀缺已成为制约机器人视觉感知、自主操控能力升级的核心瓶颈之一。相较于第三人称视角采集的操作数据,第一人称视角(Egocentric)数据能够更精准还原人类执行操作时的视觉输入逻辑与动作决策路径,是当前机器人学习领域的刚需数据类型。
2026年5月2日,SUZ-tsinghua团队正式在全球最大的AI开源社区HuggingFace首发egocentric_adjust_bottle数据集,面向机器人操作、视觉感知两大核心研发场景开放使用。
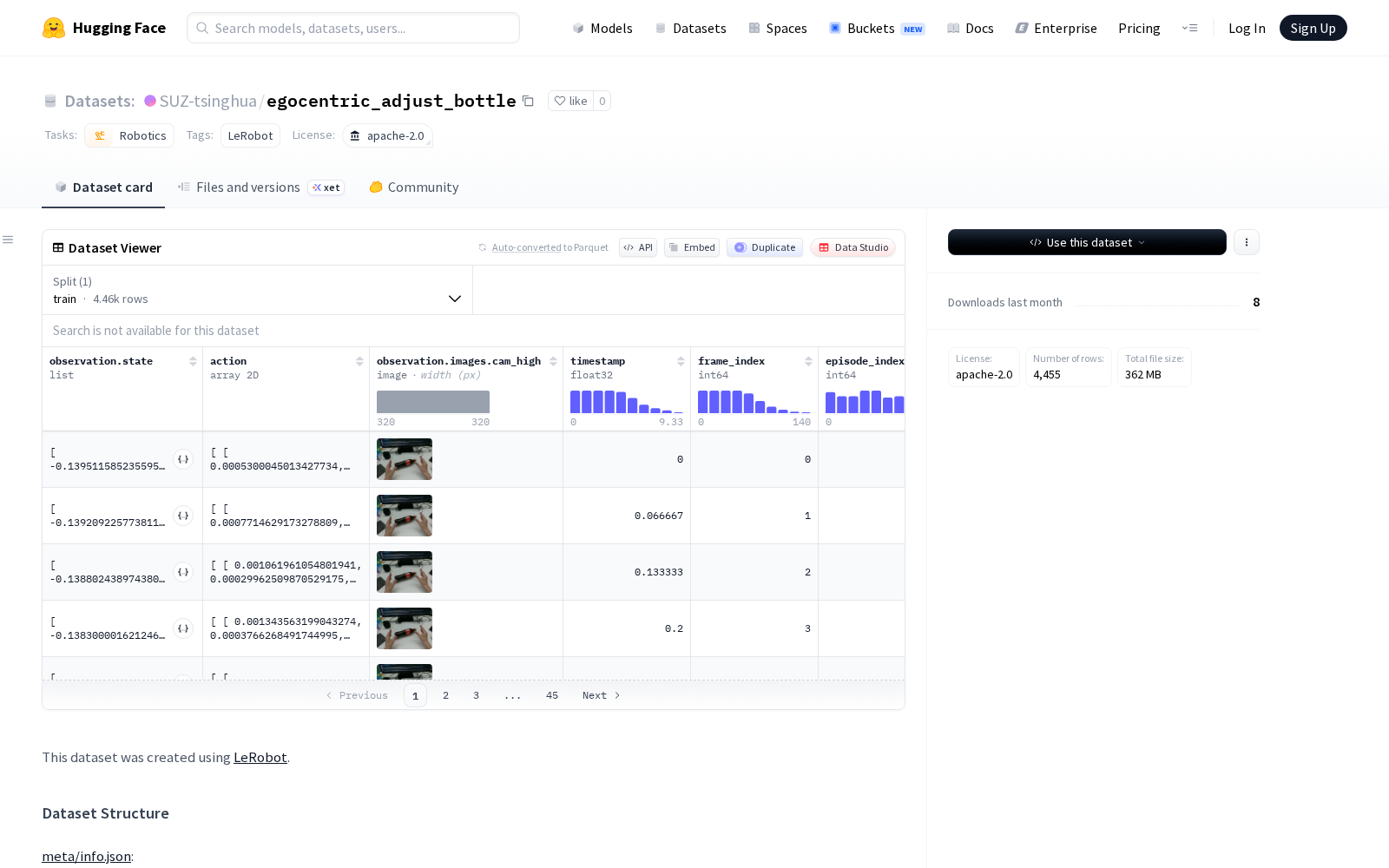
据公开信息显示,本次发布的egocentric_adjust_bottle数据集基于Meta开源的LeRobot机器人学习框架构建,该框架广泛应用于机器人操纵、导航任务的数据集生产与模型训练,基于该框架输出的数据集具备良好的生态兼容性,可直接适配主流机器人学习模型的训练流程,大幅降低研发者的数据预处理成本。
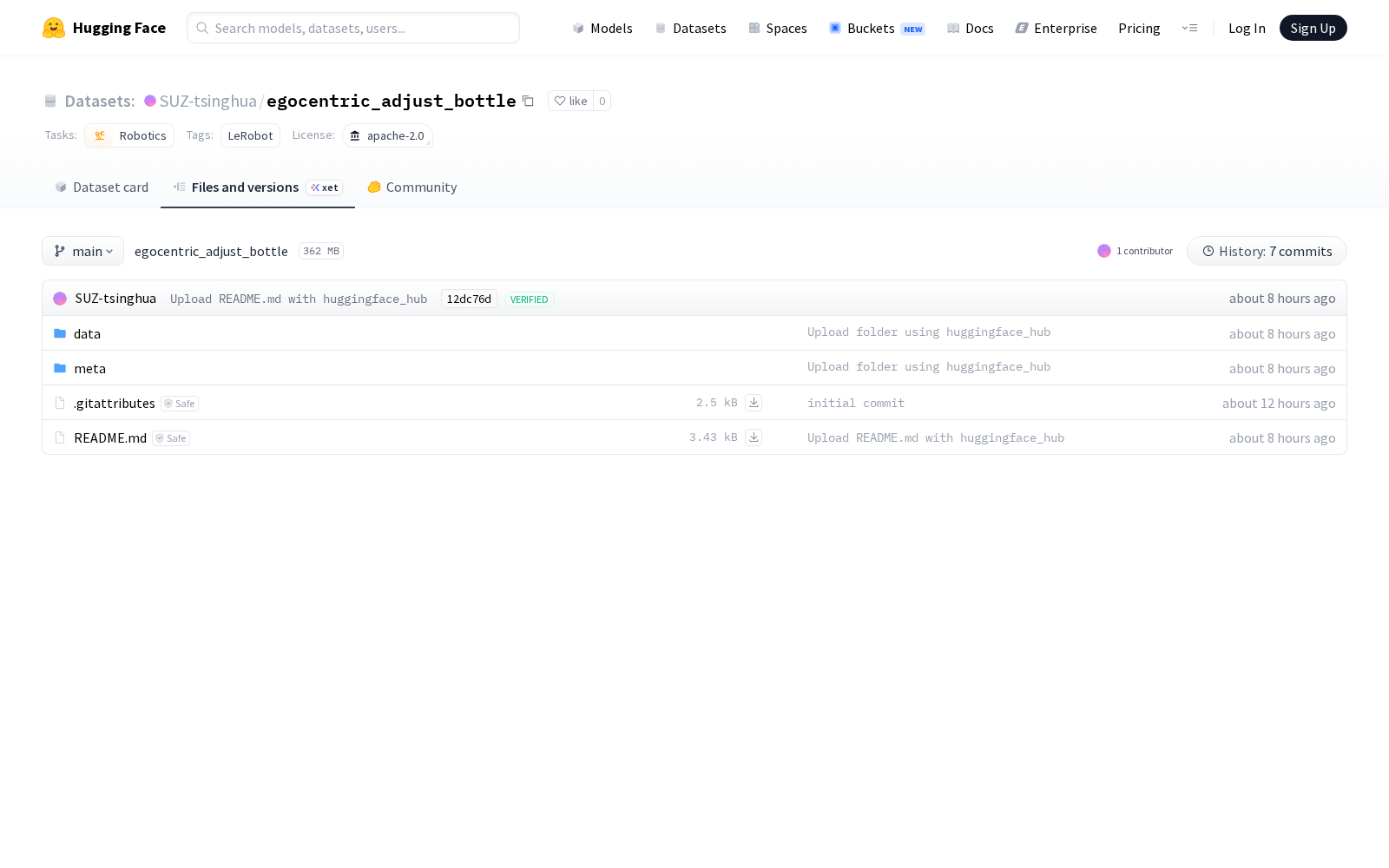
数据集的核心结构参数已在meta/info.json文件中完成标准化披露,涵盖代码库版本、机器人类型、总剧集数、帧数、任务数、块大小、数据和视频文件大小、帧率、分割规则、数据和视频路径以及特征维度等核心信息。其中特征维度覆盖观察状态、动作指令、多视角摄像头采集图像、时间戳、帧与剧集索引、任务索引等全链路操作数据,能够完整还原瓶体调整操作的全流程交互信息,为算法训练提供多维度的标注支撑。值得注意的是,目前该数据集的详细描述、官方主页、配套论文及引用规范暂未在README文件中披露,后续将逐步补充完善。
从行业应用价值来看,该数据集可广泛应用于多个具身智能研发场景:在机器人操作领域,可用于训练服务机器人的桌面物品整理、餐饮场景饮品摆放、工业协作机器人的小型物料姿态调整等细粒度操控能力;在视觉感知领域,可支撑第一人称视角动作识别、操作意图预判、动态场景理解等算法的迭代优化。作为开源共享的垂直场景训练数据,该数据集的发布将有效降低中小研发团队的实机数据采集成本,进一步丰富国内具身智能领域的开源数据供给,为数据要素赋能实体产业落地提供典型样本。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)