

当前人形机器人、工业服务机器人正处于规模化落地的关键期,多模态感知与精细化动作控制能力是决定机器人实际作业效率的核心指标,而高质量、场景匹配度高的标注训练数据集,是相关算法迭代的核心基础,长期以来也是细分领域研发的核心供给缺口。近日,开发者jogarulfo正式发布专用数据集eval_dataset_MVP_store_cardboardv5,于2026年5月2日首发上线HuggingFace社区,精准匹配机器人视觉感知、动作控制领域的训练需求。
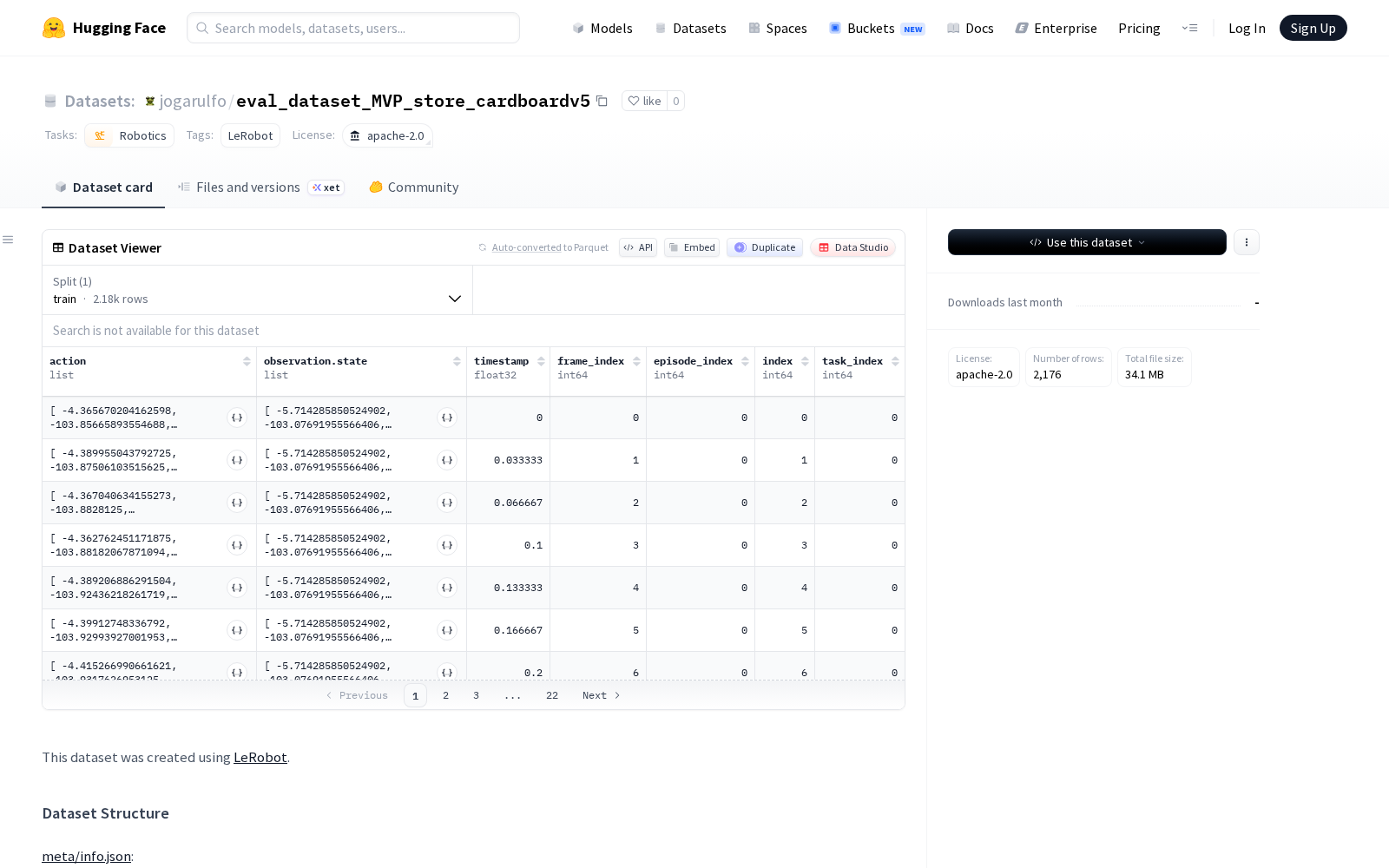
该数据集基于HuggingFace旗下开源机器人研发框架LeRobot创建,是面向仓储纸板处理作业场景的专用训练数据集,相比通用机器人数据集,其场景针对性更强、标注维度更贴合机器人实际作业的数据流逻辑,可直接对接主流机器人模型训练管线。据公开信息显示,eval_dataset_MVP_store_cardboardv5覆盖1个特定作业任务、2组完整作业情景,总帧数达2176帧,结构化数据文件大小为100MB,配套视频文件大小为200MB。数据集维度包含机器人实时动作参数、作业状态观测数据(同步采集的手腕摄像头、顶部机位双视角图像)、时序时间戳、情景索引标签,同时公开了详细的技术规格说明,涵盖数据类型、维度形状、视频帧率、分辨率、编解码标准等核心信息,可大幅减少开发者的数据预处理成本。
从应用方向来看,该数据集可广泛应用于多个机器人研发场景:例如仓储场景下纸板分拣、码垛机器人的视觉定位与动作控制算法训练,多视角视觉融合的机器人环境感知模型优化,端到端模仿学习的动作序列生成算法验证,以及动态作业场景下的机器人安全避障策略测试等,可有效降低相关研发团队的原始数据采集成本,加快算法迭代效率。作为垂直场景的专用训练数据集,本次发布的eval_dataset_MVP_store_cardboardv5也进一步丰富了全球机器人领域的训练数据供给,为数据要素在人工智能垂直赛道的落地应用提供了典型样本,对推动机器人技术的场景化落地具有积极作用。
查看eval_dataset_MVP_store_cardboardv5
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)