

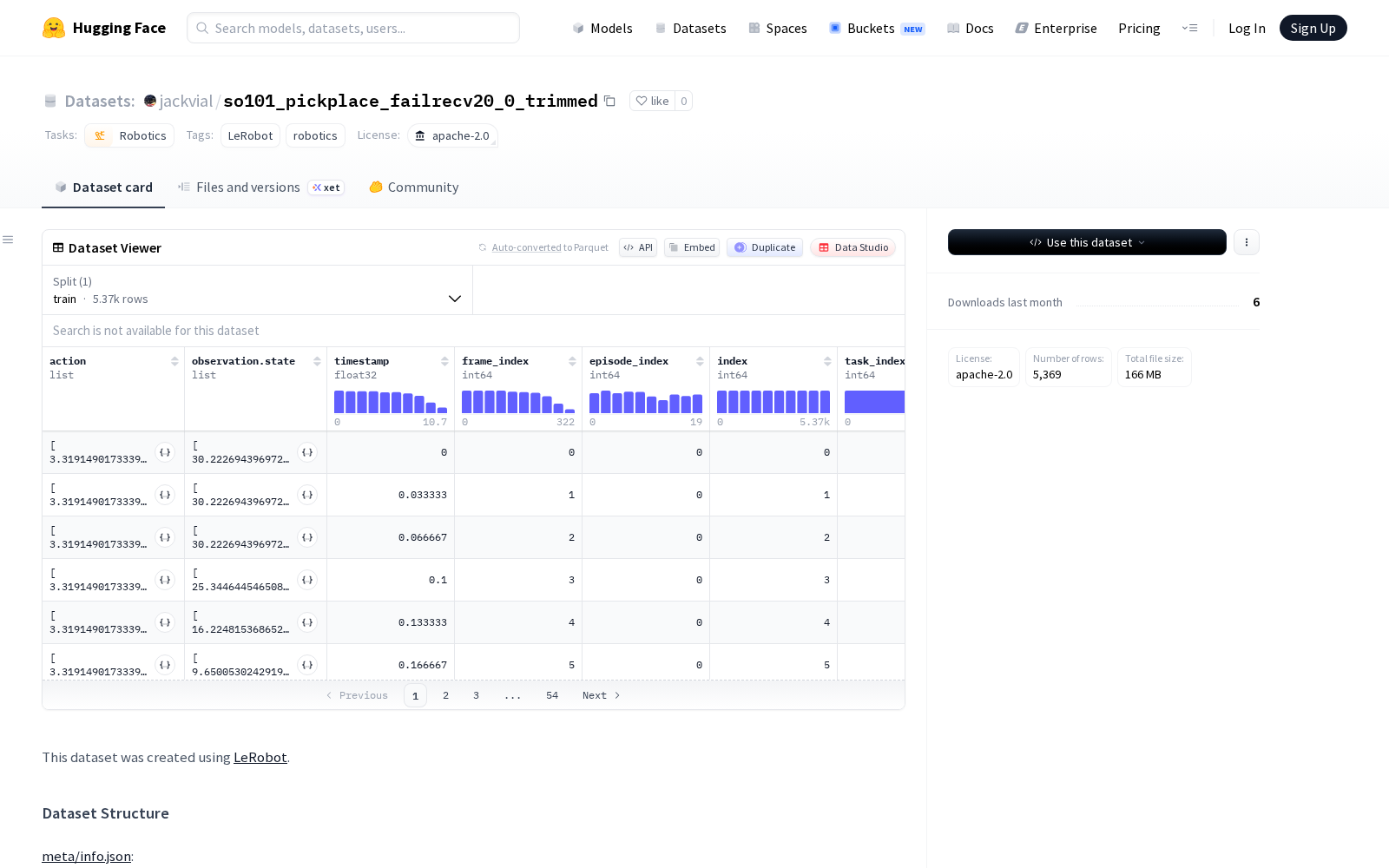
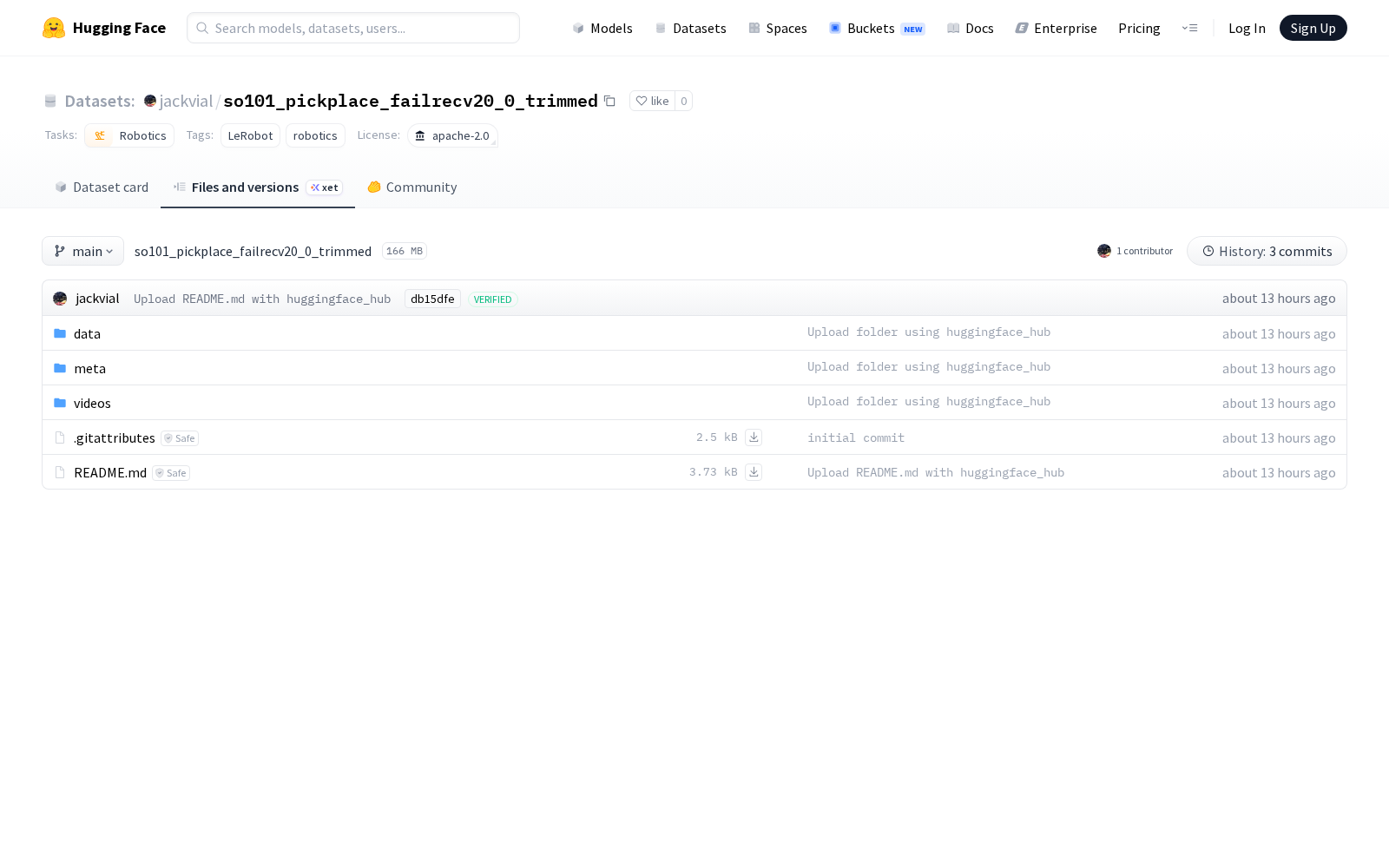
jackvial本次发布的数据集so101_pickplace_failrecv20_0_trimmed,这是一个由LeRobot创建的机器人控制数据集。数据集包含20个任务片段,共5369帧数据,记录了机械臂的关节位置信息(包括肩部平移、肩部升降、肘部弯曲、腕部弯曲、腕部旋转和夹持器位置)以及来自顶部和侧面的视频观察数据。视频分辨率为600x800,帧率30fps。数据以parquet格式存储,视频以mp4格式存储。数据集主要用于机器人控制相关的训练和研究。
查看so101_pickplace_failrecv20_0_trimmed
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)