

当前全球机器人产业正处于高速发展期,人形机器人、工业协作机器人的算法迭代速度持续加快,但覆盖实机动作参数、多视角视觉配对的高质量标准化数据集,一直是制约行业研发效率的核心瓶颈:多数中小团队受限于硬件成本、数据采集标注能力,难以自主搭建合规的实机数据采集环境,直接拖慢了机器人通用智能落地的进度。
2026年5月2日,科技团队riku4050正式在全球最大的AI开源社区及数据集托管平台HuggingFace发布专用数据集eval_test12,为机器人细分领域研发提供了新的标准化数据选择。
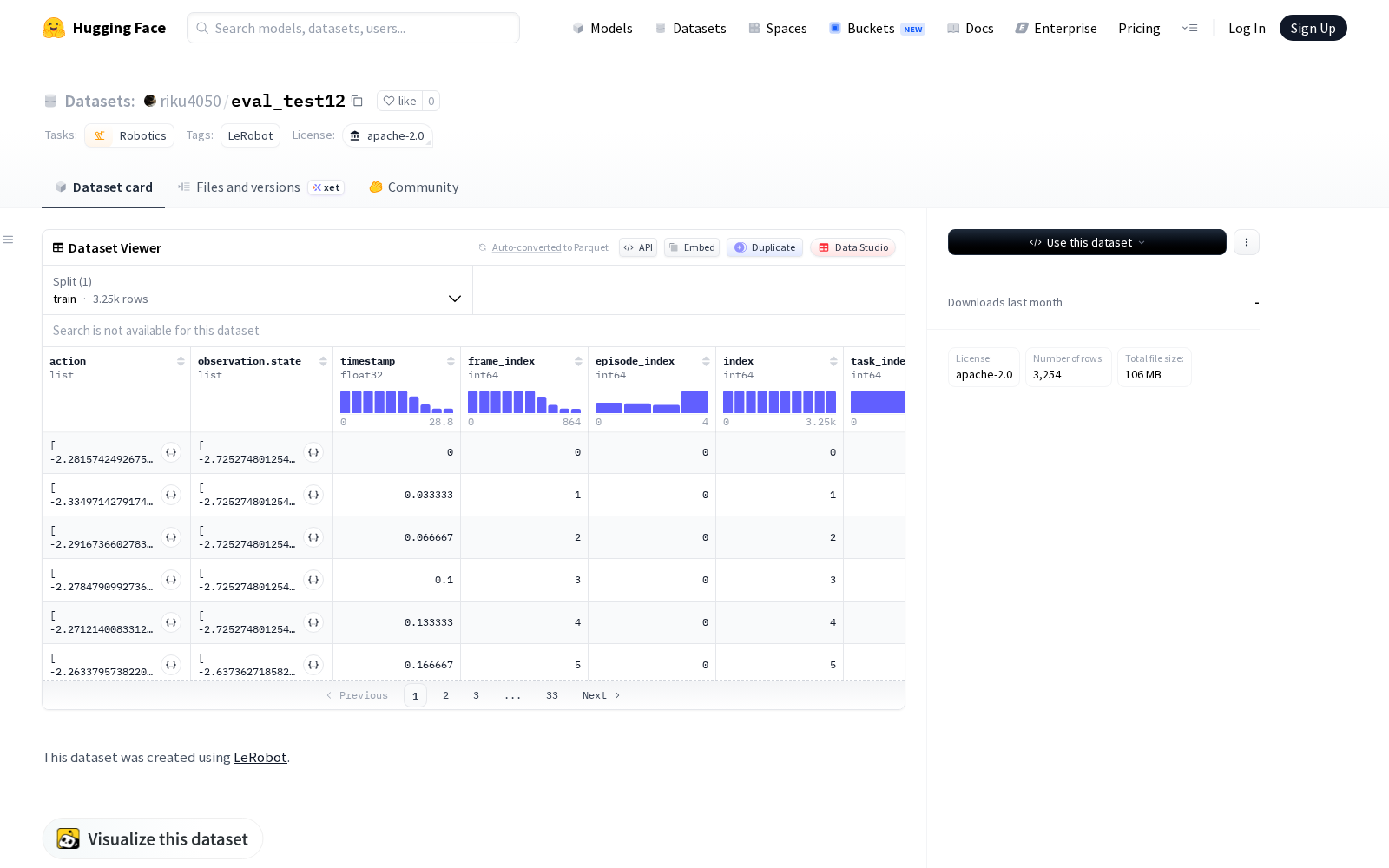
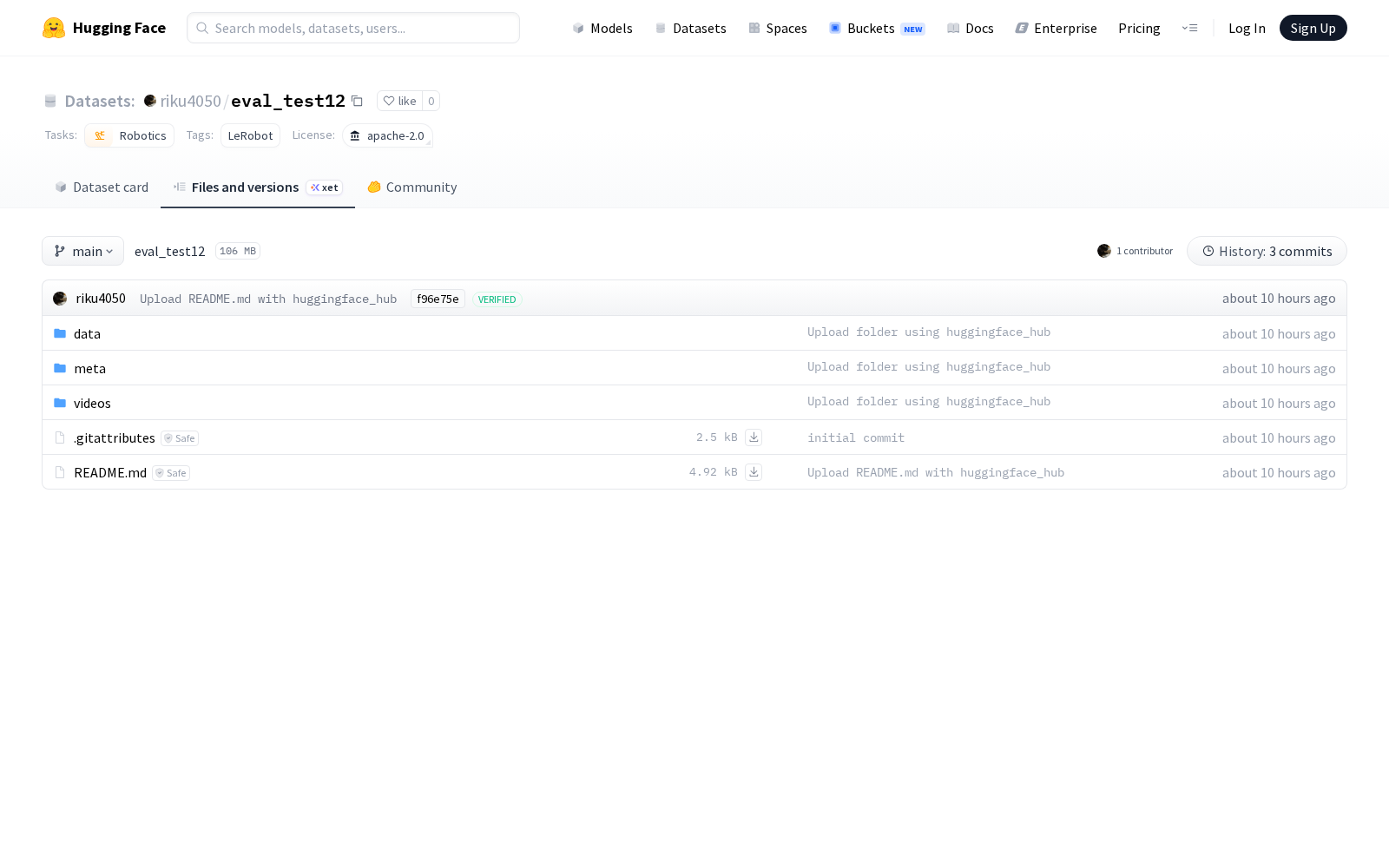
据介绍,eval_test12数据集基于机器人领域通用的LeRobot框架构建,核心覆盖机器人技术研发场景,完整包含机器人手臂的动作指令、多维度状态观察数据,以及帧、片段和任务的全链路索引信息。具体来看,数据集既标注了机器人肩部、肘部、腕部和夹持器的全关节位置信息,也同步收录了来自基础、右侧、前方三个不同视角的实拍视频图像,实现了动作参数与视觉数据的一一对应。数据结构化内容采用parquet格式存储,视频文件采用通用mp4格式存储,帧率为30fps,全量数据集共包含5个片段、3254帧数据、对应1个研发任务,其中结构化数据文件大小为100MB,视频文件总大小为200MB,整体轻量化的设计也方便研发团队快速下载部署。
从应用场景来看,该数据集可同时满足机器人动作控制、多视角视觉感知两大核心方向的研发需求:在动作控制领域,数据集配套的全关节参数与动作指令配对数据,可用于机械臂轨迹规划算法训练、精细操作策略验证、动作误差校准模型研发等场景,覆盖工业分拣、实验室自动化操作等落地需求;在多视角视觉感知领域,多机位同步采集的视频数据可用于多视角视觉3D重建、视觉伺服定位、动态环境下的目标跟踪、跨视角语义分割等算法的训练与基准测试,帮助提升机器人在复杂场景下的环境感知与决策能力。此外,由于采用了行业通用的LeRobot框架构建,该数据集兼容性强,可直接接入多数主流机器人研发训练框架,无需额外做格式转换,能够有效降低研发团队的数据预处理成本。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)