

当前,全球智能制造、柔性生产的需求快速释放,协作机器人、工业自主操作机器人的市场渗透率逐年攀升,而机器人自主操作能力的算法训练高度依赖高质量、标准化的动作数据集。此前机器人学习领域的数据集普遍存在格式不统一、场景覆盖零散等问题,研发团队往往需要花费30%以上的研发周期进行数据清洗、格式转换等预处理工作,极大拖慢了算法迭代效率。为解决这一痛点,HuggingFace推出LeRobot统一机器人数据集格式,为不同机器人平台、不同场景的训练数据提供统一的存储、调用标准,目前已成为全球机器人学习领域应用最广泛的数据集规范之一。
研究者bartek-niedzielski本次发布的panda_pick_and_place_10,正是符合LeRobot格式的专项机器人数据集,于2026年5月3日首发于HuggingFace平台,核心覆盖机器人拾取放置、协作机器人控制两大应用场景。
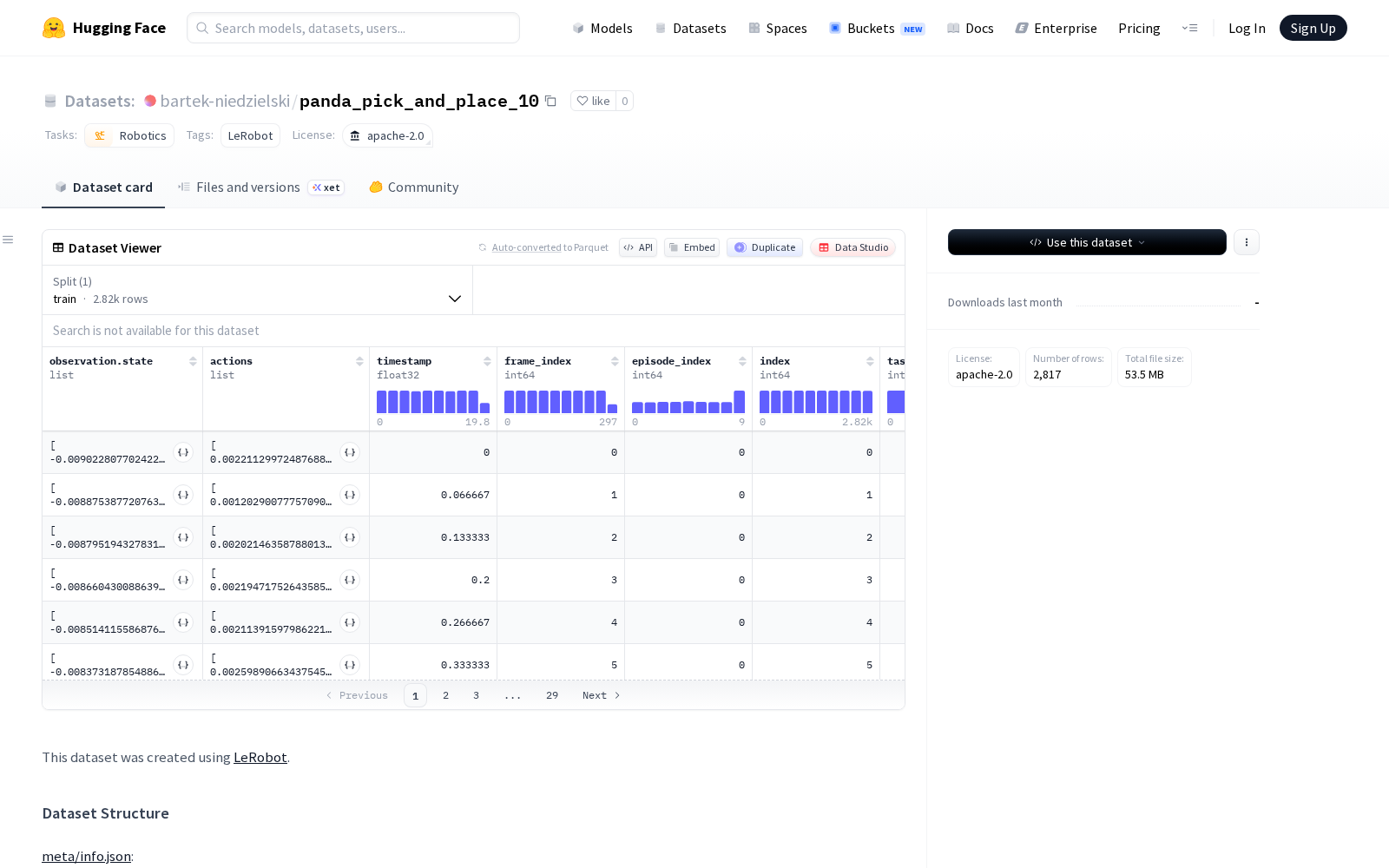
Dataset card内容:
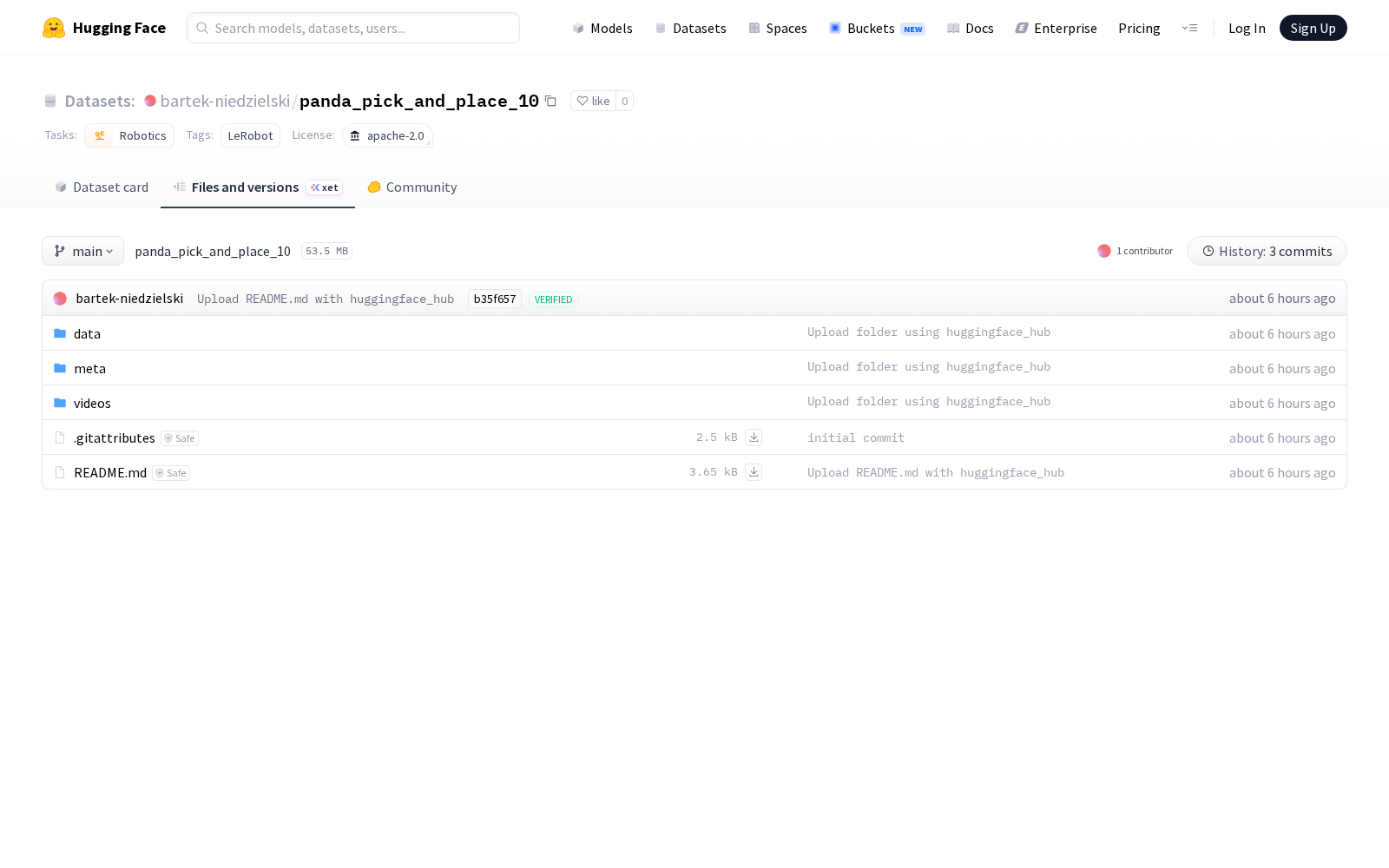
Files and versions内容:
从应用价值来看,该数据集可为相关研发团队提供标准化的拾取动作训练数据,典型应用方向包括工业产线的异形零部件自动分拣、物流仓储场景的拆垛码垛、3C电子行业的精密元器件装配、人机协同产线的柔性操作等。研发人员可直接基于该数据集开展强化学习模型训练、计算机视觉与机械臂控制的耦合算法优化,无需额外进行大规模的格式适配工作,可有效缩短研发周期,降低数据获取成本。
本次数据集的发布也进一步丰富了LeRobot生态下的工业场景专项数据储备,为机器人学习领域的技术共享、算法迭代提供了公共数据支撑,也为数据要素在智能制造领域的价值落地提供了典型实践样本。后续随着更多细分场景专项数据集的上线,机器人自主操作技术的落地进度有望进一步加快,支撑更多柔性制造场景的数字化升级。



_1769672084863.jpg)