

近年来,随着协作机器人、人形机器人产业进入规模化落地窗口期,机器人精细化操作能力成为决定产品实用性的核心指标,而真实场景下的多模态操作训练数据,始终是制约精准控制算法迭代的核心瓶颈。这类数据的采集需要搭建实体机器人测试环境,标注维度复杂、投入成本较高,优质垂直场景开源数据集的供给长期存在缺口。2026年5月3日,开发者ykorkmaz正式在全球知名AI开源社区Hugging Face发布delta_open_drawer_and_put_toy_success_1数据集,专门面向机器人操作任务、精准控制领域的研发需求,为行业提供了经过验证的高质量训练数据源。
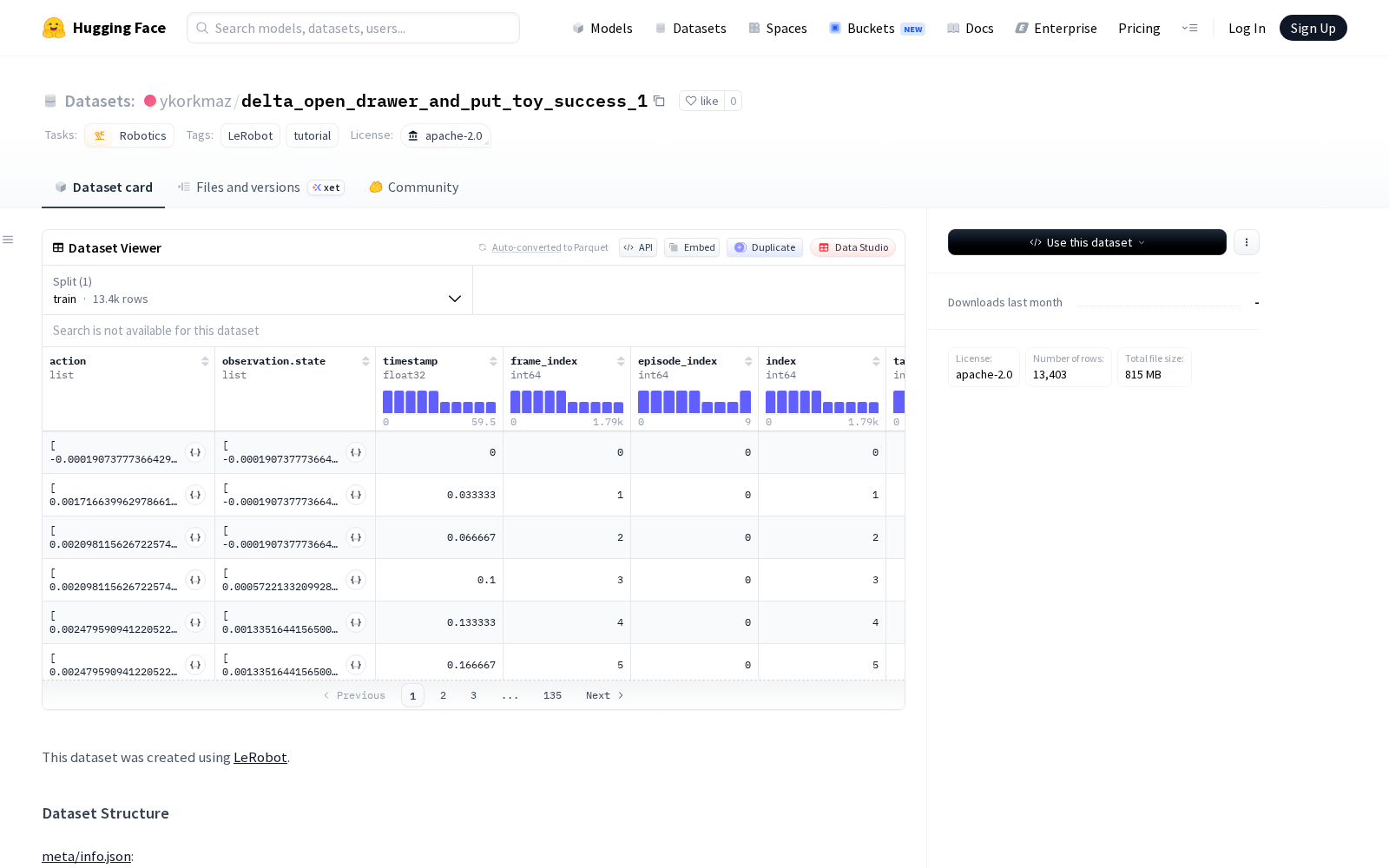
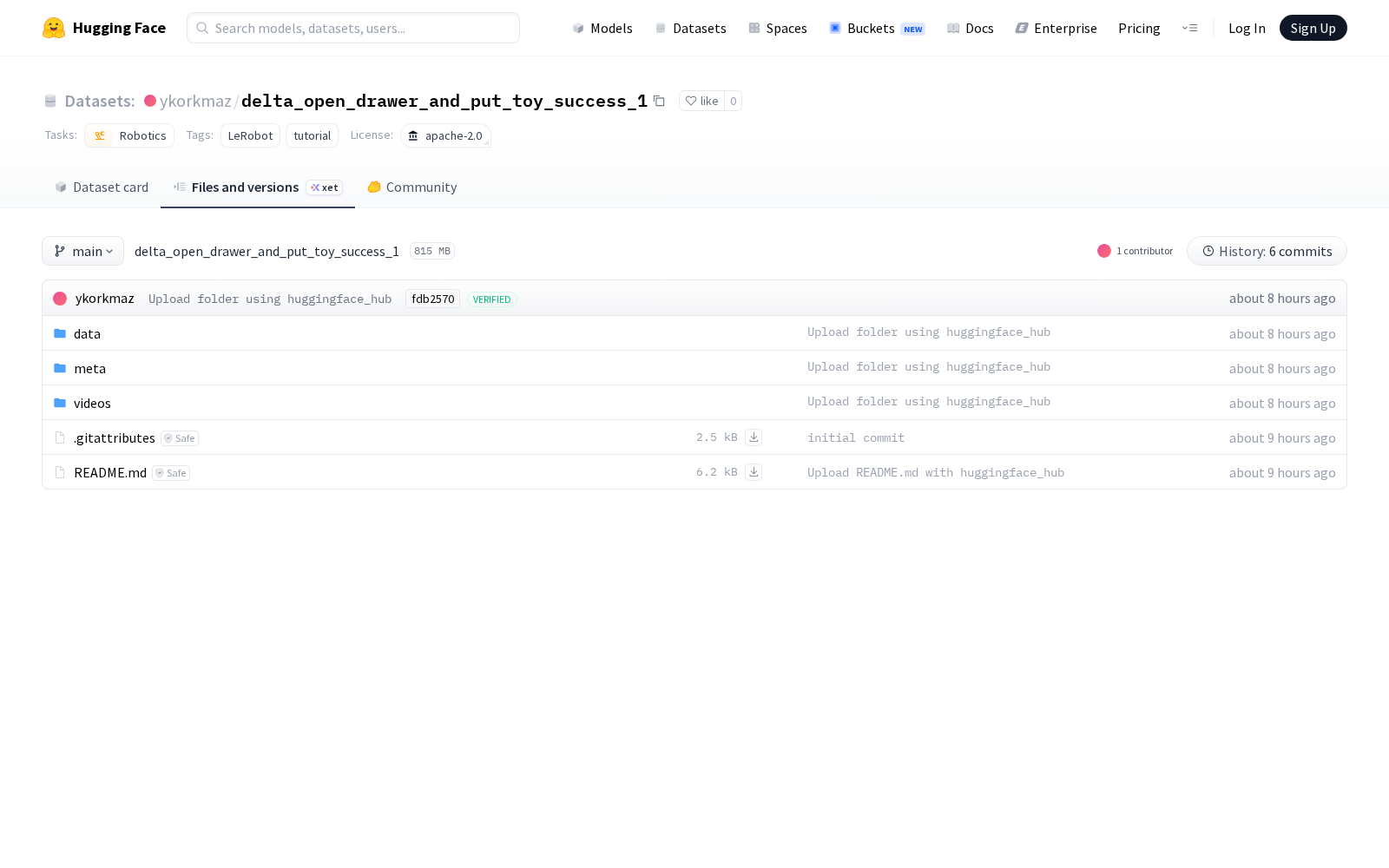
本次发布的数据集基于Hugging Face推出的机器人学习专用框架LeRobot构建,所有数据均来自Delta机器人完成“开抽屉+放置玩具”操作的成功执行流程,覆盖多维度核心参数:既包含机器人执行操作的动作指令数据,也包含机器人运行过程中的实时状态观测数据、多机位摄像头采集的全流程视觉图像数据,同时配套了精准的时间戳、帧索引标记。整个数据集结构清晰完善,所有特征均标注了对应的数据类型、形状和名称,开发者无需进行复杂的预处理即可直接调用。为最大化降低使用门槛,该数据集采用Apache 2.0开源许可证,支持学术研究、商业开发等场景的免费复用、修改与分发,适配不同主体的研发需求。
查看delta_open_drawer_and_put_toy_success_1
Dataset card内容:
Files and versions内容:
从应用价值来看,该数据集聚焦“接触式操作+小件物品放置”这一典型机器人任务场景,可广泛适配多个研发方向:在工业制造场景中,可用于训练协作机器人完成产线零件取放、物料盒开关、工位物料整理等精细化操作,提升工业机器人的任务成功率与操作精度;在家居服务场景中,可支撑家用服务机器人开发抽屉开关、物品收纳等功能,优化民用机器人的使用体验;在底层技术研发层面,数据集同步包含视觉感知数据与机器人本体状态数据,可用于多模态融合控制算法、力控算法的训练迭代,帮助研发团队降低数据采集成本,缩短研发周期。作为机器人细分场景的专用开源数据集,本次发布的产品也为垂直领域数据要素的开源供给提供了参考,进一步完善了机器人研发领域的开源数据生态,对推动机器人控制技术的普惠化发展具有积极意义。



_1769672084863.jpg)