

当前,人形与工业双臂机器人正进入商业化落地关键期,模仿学习作为机器人快速习得复杂操作技能的核心技术路径,对细分场景下的多模态对齐训练数据有着极高需求。但由于机器人数据采集成本高、标注难度大,面向特定操作场景的高质量公开数据集始终是行业稀缺资源,制约了相关算法的研发迭代速度。
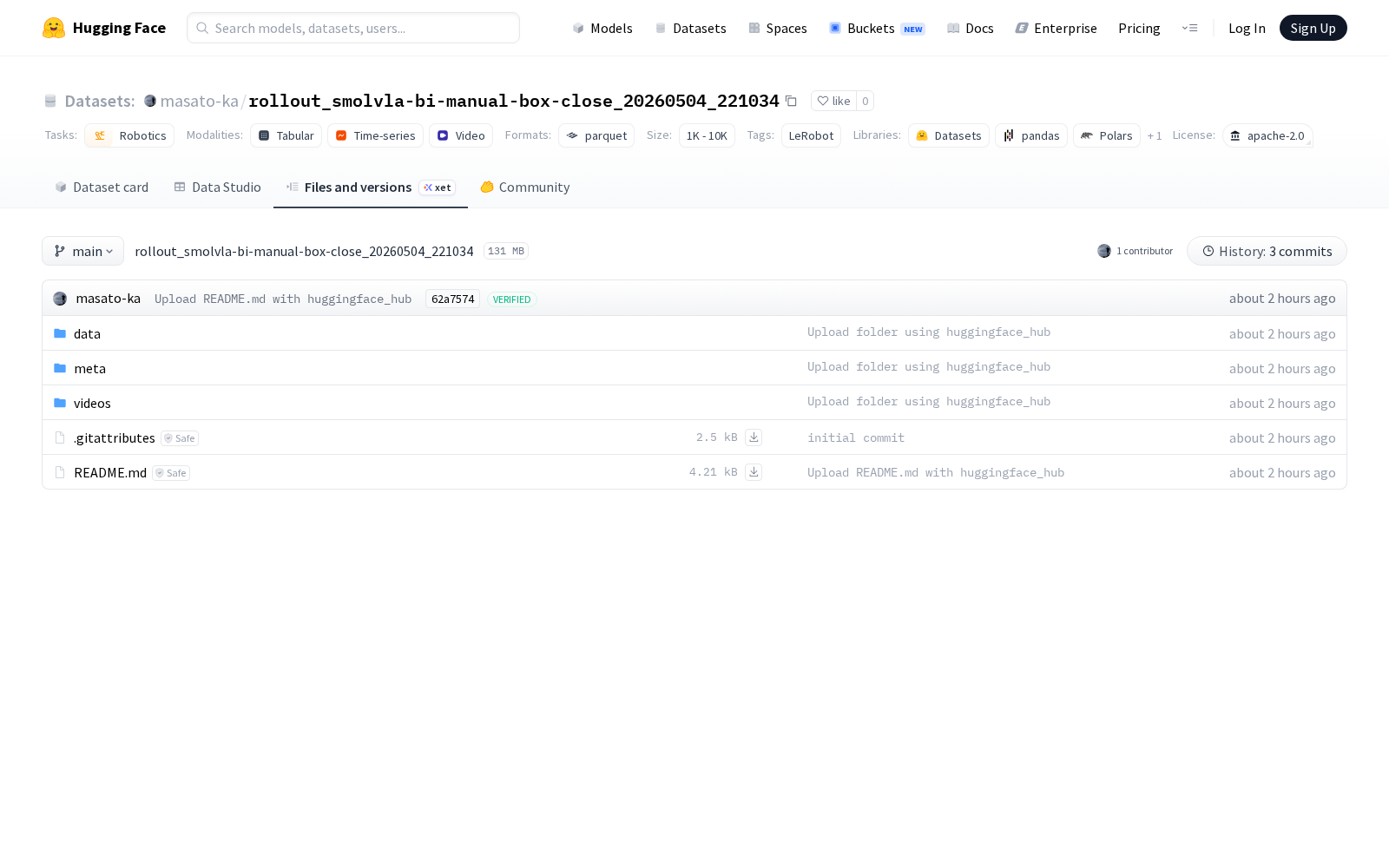
本次上线的rollout_smolvla-bi-manual-box-close_20260504_221034数据集,是开发者masato-ka基于LeRobot框架打造的双臂机器人关箱操作专用视频数据集,针对性覆盖了双臂机器人完成关箱动作的全流程数据,可直接用于双臂机器人操作算法、模仿学习模型的训练研发。
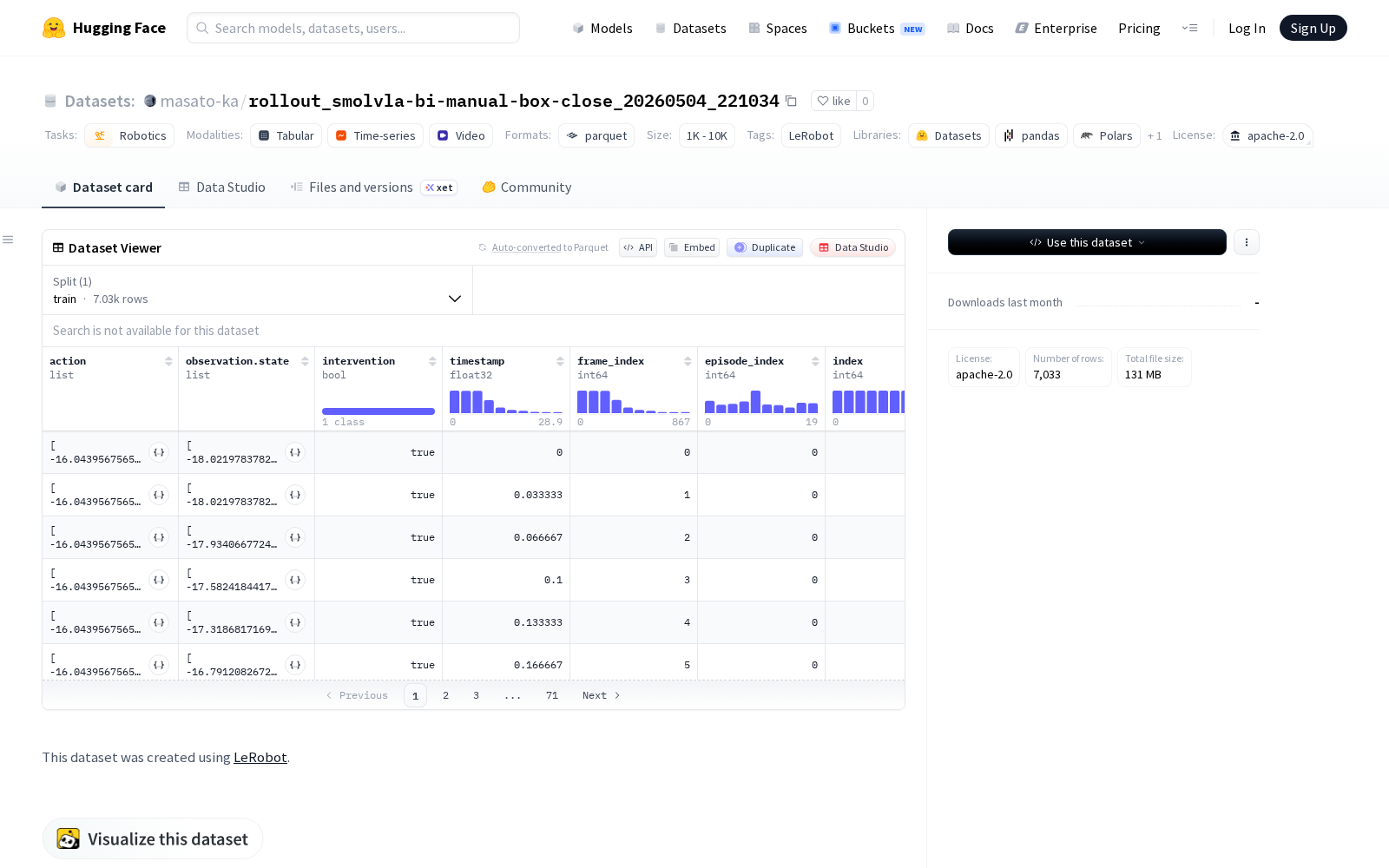
据公开信息显示,该数据集包含多维度对齐的核心数据:一是机器人执行关箱动作时的状态观测数据,覆盖全部12个关节的实时位置数据,可直接反映双臂动作的协同逻辑;二是右前视角录制的480x640分辨率视频图像,完整记录操作场景的视觉变化;同时还配套了干预标记、时间戳、帧索引等标注信息,方便研发人员直接调用进行多模态训练。整个数据集共包含20个操作序列(episodes)、7033帧有效数据,视频帧率为30fps,总数据量约300MB,其中数据文件100MB、视频文件200MB。本次采集采用的机器人型号为bi_so_follower双臂跟随机器人,所有数据均划为训练集开放。
从应用场景来看,该数据集的多模态对齐属性可支撑多个研发方向:在双臂机器人控制领域,可用于训练双臂协同操作算法,优化工业场景下的装箱、分拣、装配等精细动作的完成精度;在模仿学习领域,研发人员可基于标注的动作-视觉对应数据,训练机器人通过学习演示动作快速掌握操作技能,降低机器人适配新场景的开发成本;此外,该数据集也可用于机器人多模态感知模型的训练,验证视觉信息与关节姿态数据的对齐算法效果。
该数据集的发布,进一步丰富了机器人操作细分领域的公开训练数据资源,为中小研发团队降低了数据采集门槛,对于加速双臂机器人在工业制造、物流仓储、家庭服务等场景的落地应用具有积极意义,也为人工智能细分领域的训练数据要素流通提供了参考样本。
查看rollout_smolvla-bi-manual-box-close_20260504_221034
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)