

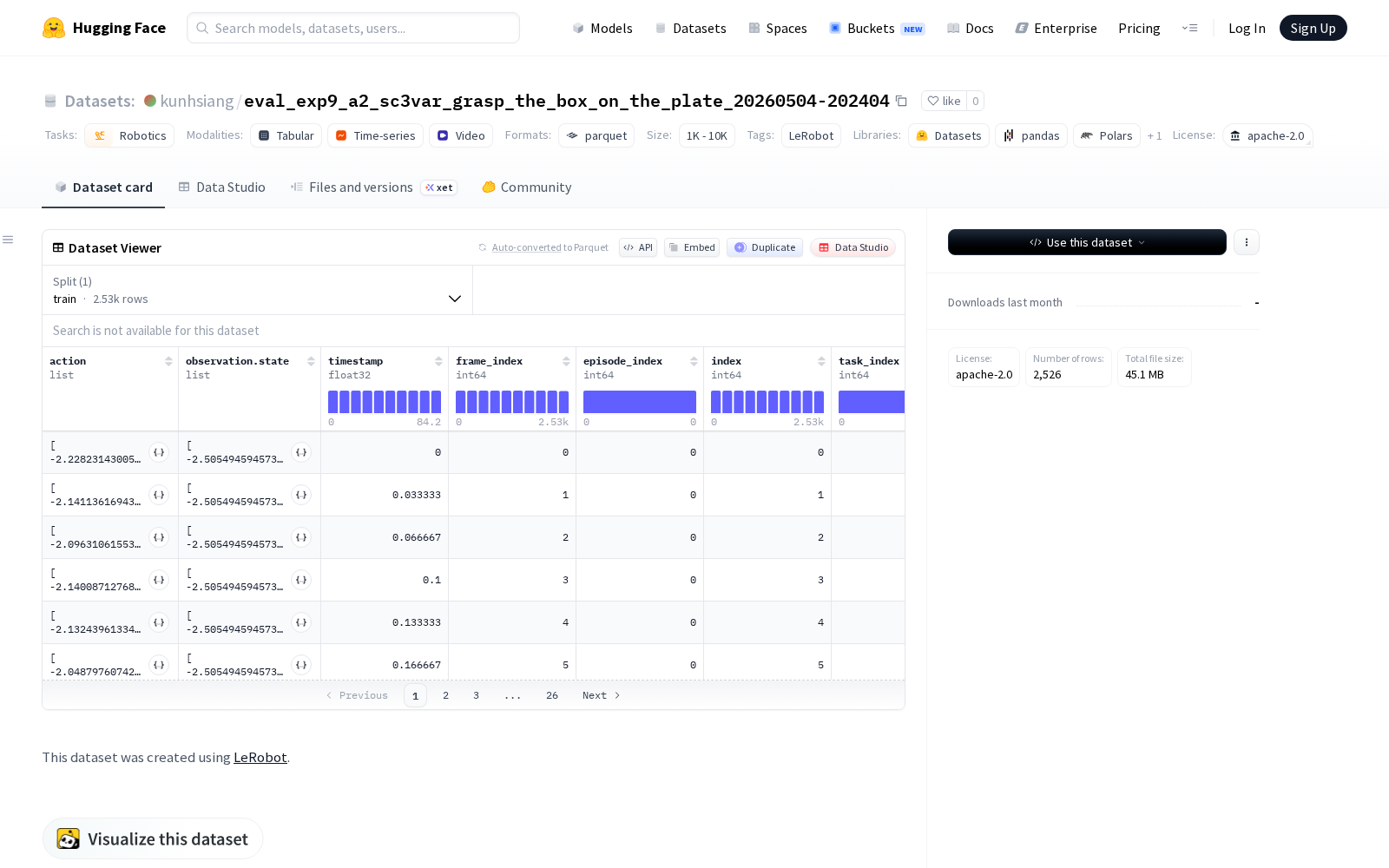
kunhsiang本次发布的数据集eval_exp9_a2_sc3var_grasp_the_box_on_the_plate_20260504-202404,该数据集是使用LeRobot创建的机器人技术数据集。它包含1个任务、1个片段和2526帧数据,数据文件大小为100MB,视频文件大小为200MB。数据集结构包括动作、观察状态和来自不同视角(前、顶、夹持器)的图像,以及时间戳和索引。数据以30帧每秒的速率采集,存储为parquet和mp4格式。
查看eval_exp9_a2_sc3var_grasp_the_box_on_the_plate_20260504-202404
Dataset card内容:
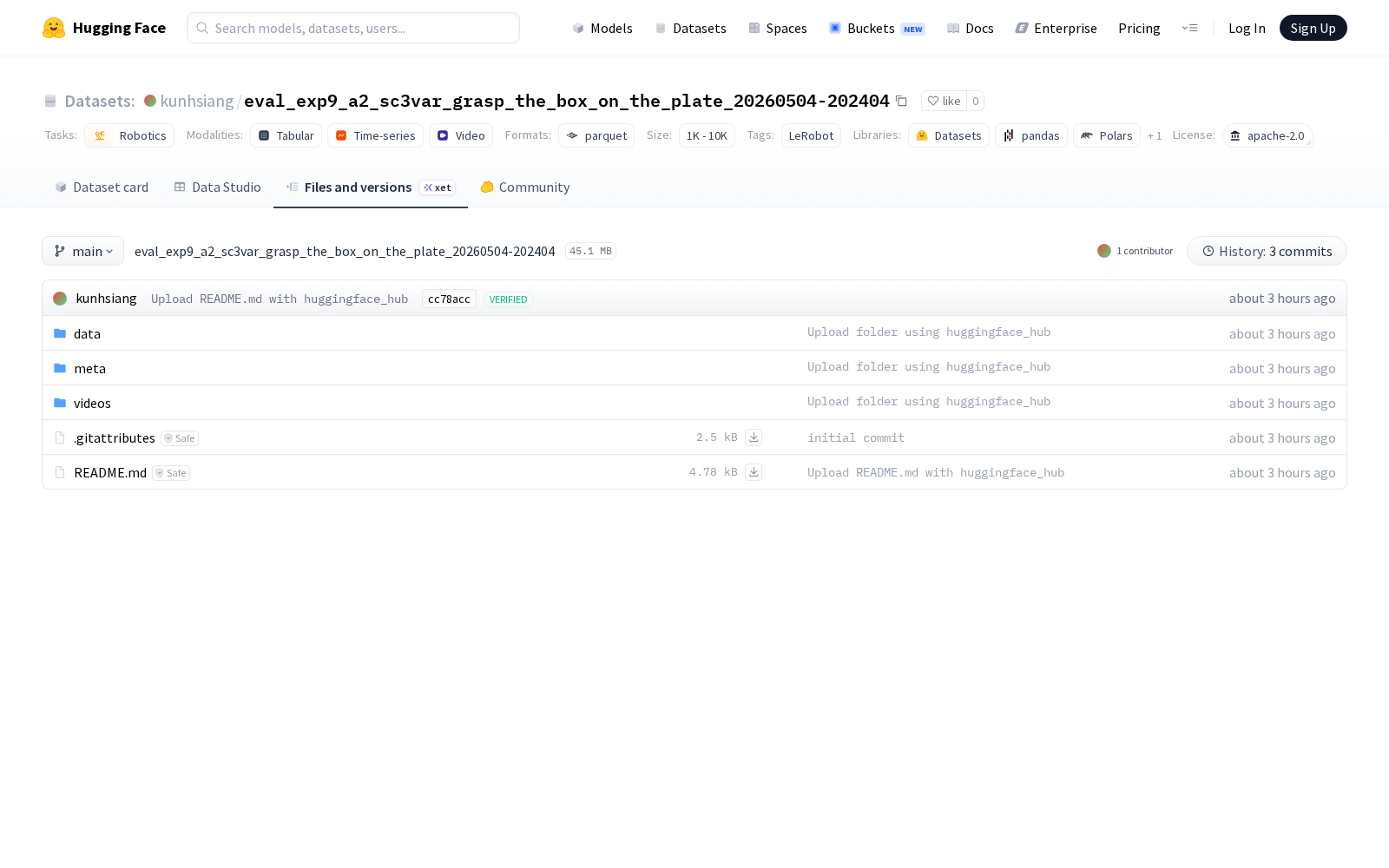
Files and versions内容:



_1769672084863.jpg)