

近年来,随着工业柔性生产需求持续释放,人形机器人、工业协作机器人的研发进程不断提速,而覆盖真实作业场景的多模态标注数据集,已经成为制约机器人运动控制、视觉感知算法迭代的核心瓶颈之一,行业对细分场景的高质量开源数据集需求持续攀升。
近日,工业智能领域机构Factory-Intelligence正式发布NIRANJAN_wire_hook_20260325_test7机器人专用数据集,该数据集于2026年5月4日首发于全球最大的AI开源社区HuggingFace,主要面向机器人运动控制、视觉感知两大核心研发领域开放。
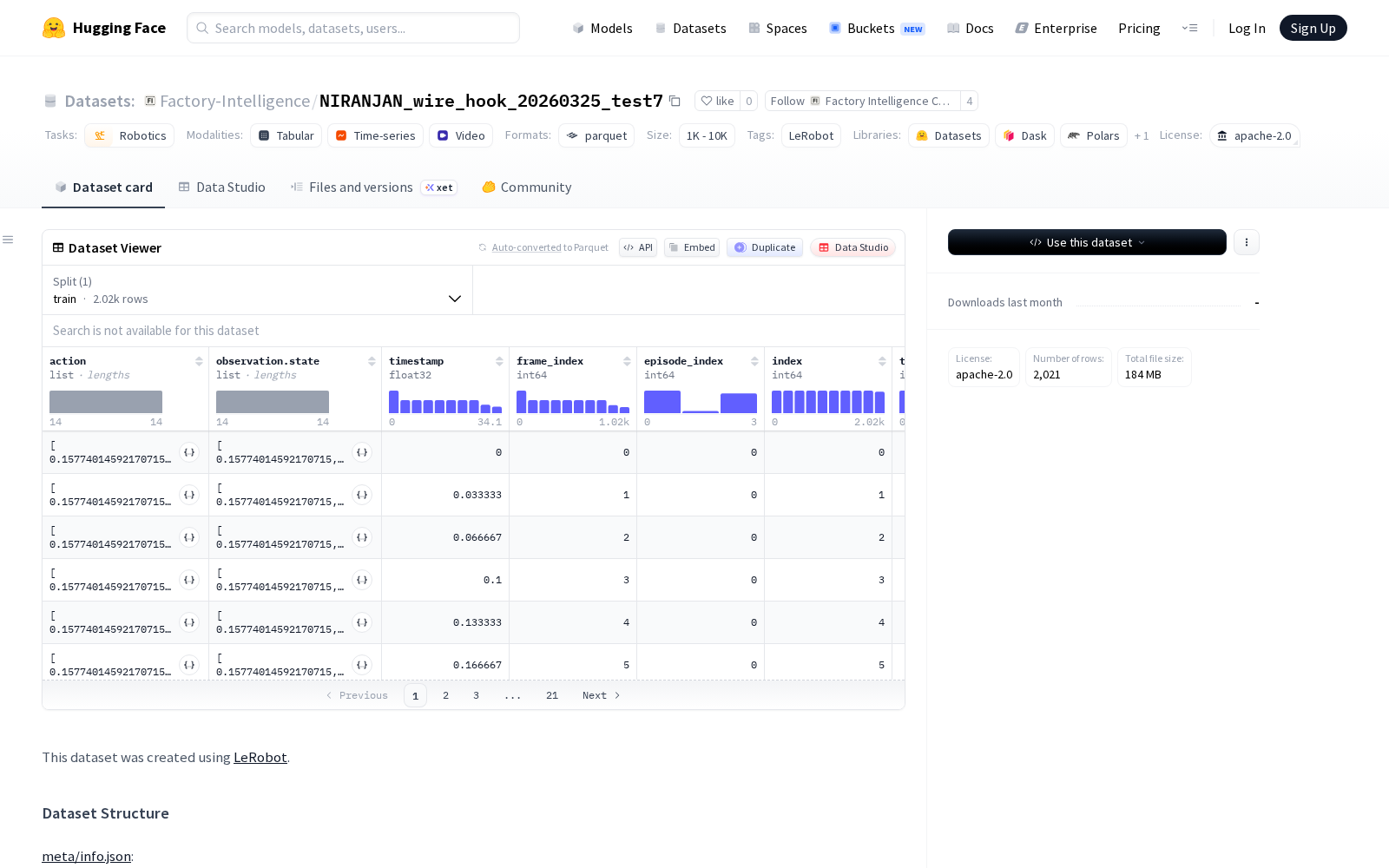
据公开信息显示,该数据集基于机器人学习开源框架LeRobot构建,采用parquet格式存储,具备读取效率高、存储空间占用小的优势,适合大规模AI训练场景调用。尽管本次未公开数据集的场景描述文件,但官方披露的信息显示,数据集包含完整的结构与特征标注,元数据维度覆盖机器人型号、采集总集数、采样帧数、作业任务类型等核心信息,同时收录了机器人关节参数观测数据、作业动作序列数据,以及多机位采集的现场图像数据,形成了「动作-视觉」匹配的多模态数据体系。
从应用方向来看,该数据集可广泛应用于工业机器人多个研发场景:在运动控制领域,研究人员可基于数据集的关节与动作数据,训练机器人的精细动作控制模型,优化线束挂钩、插接等复杂柔性作业的动作路径,降低实体机器人的调试成本与试错风险;在视觉感知领域,多摄像头采集的图像数据可支撑目标检测、姿态估计、3D重建等模型的训练,解决工业场景下光线干扰、工件遮挡等常见的视觉识别难题;此外,匹配的多模态数据还可用于端到端机器人操控模型的训练,助力提升机器人应对复杂非结构化场景的自主作业能力。
当前我国数据要素市场建设持续推进,AI训练数据作为人工智能产业的核心基础要素,其开源共享程度直接影响产业创新效率。本次工业场景专用机器人数据集的发布,填补了细分作业场景的多模态训练数据供给缺口,将有效降低中小机器人研发团队的研发门槛,为工业机器人柔性作业技术的落地普及提供基础支撑。
查看NIRANJAN_wire_hook_20260325_test7
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)