

当前具身智能、工业机器人与服务机器人产业进入高速落地期,高质量场景化训练数据是制约机器人环境感知、自主操作能力商业化的核心瓶颈之一。其中针对特定物品抓取任务的多视角标注数据,因采集成本高、标注标准不统一,长期是行业研发的稀缺资源,本次数据集的发布进一步丰富了具身智能领域的开源数据供给。
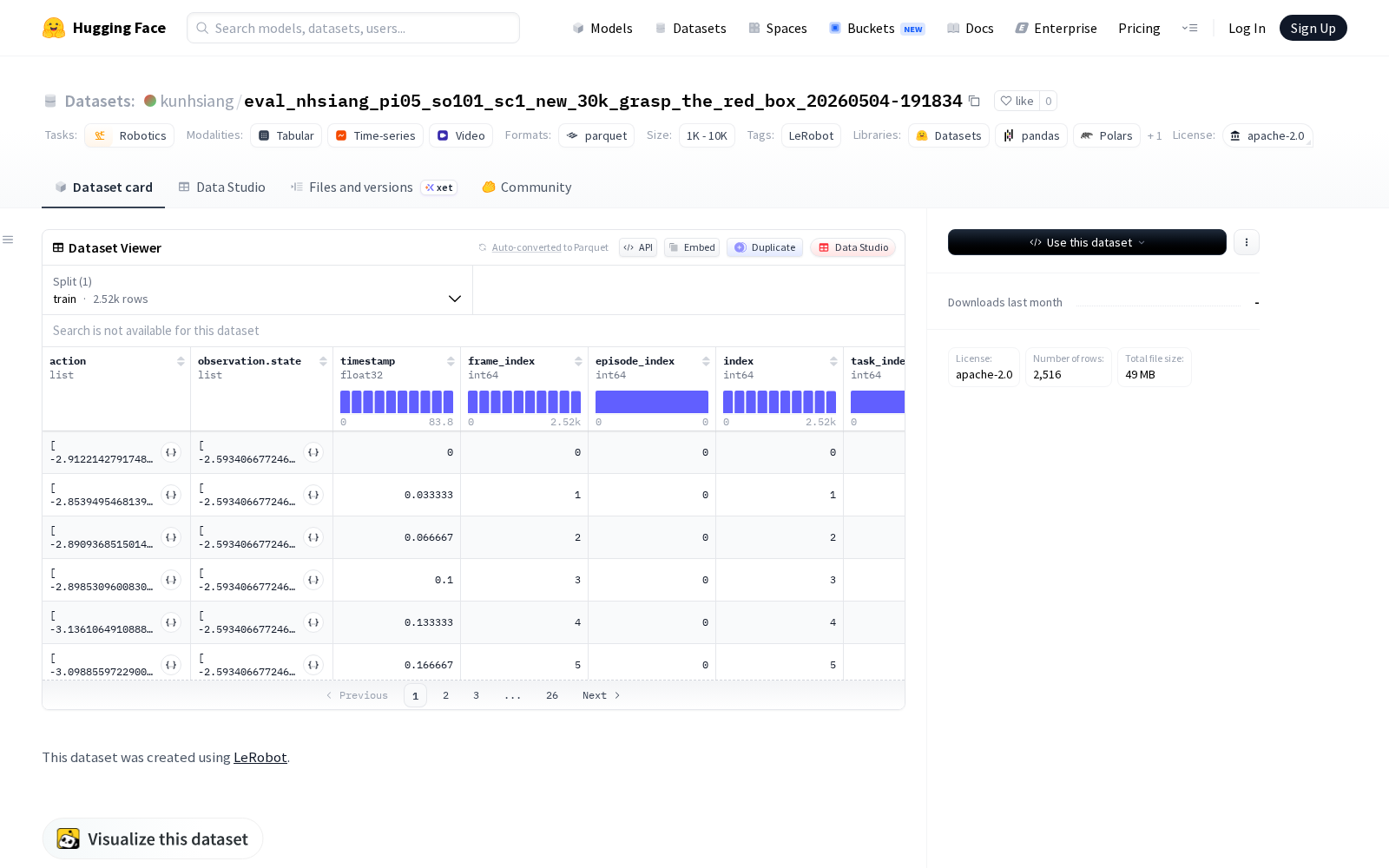
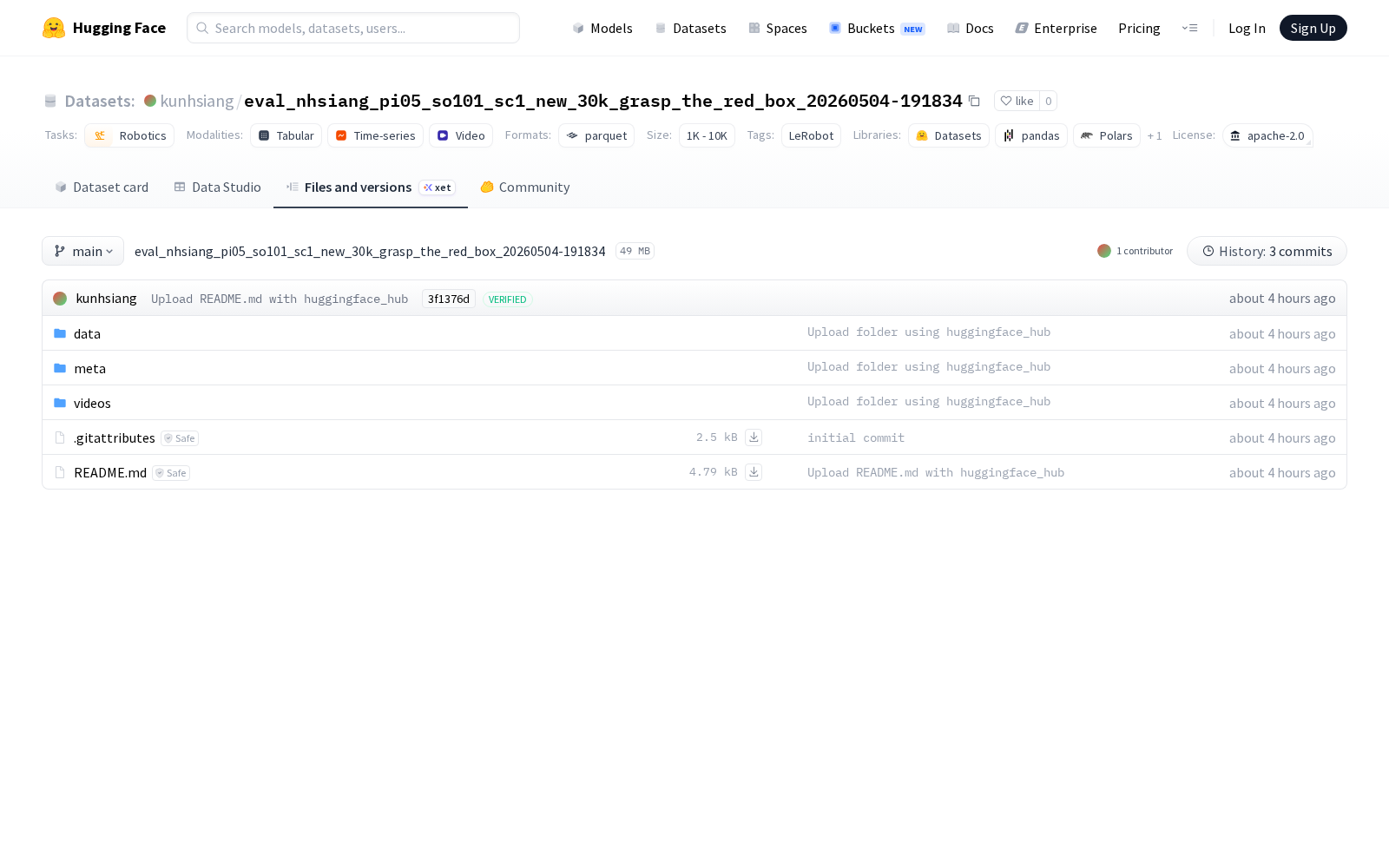
Kunhsiang本次发布的数据集eval_nhsiang_pi05_so101_sc1_new_30k_grasp_the_red_box_20260504-191834,基于Meta开源的机器人学习专用框架LeRobot构建,聚焦红盒子抓取单一任务场景,共包含1个任务片段、2516帧标注数据。数据集结构覆盖机器人操作动作、观察状态特征两大核心维度,同时同步采集了前视、顶部、夹爪三个关键视角的同步图像,可支撑多视角视觉融合算法的训练验证。该数据集总数据文件大小为100MB,配套视频文件大小为200MB,采样帧率为30fps,采用商业友好的Apache-2.0开源许可证,允许开发者免费用于非商业及商业场景的机器人相关研发工作。
查看eval_nhsiang_pi05_so101_sc1_new_30k_grasp_the_red_box_20260504-191834
从应用方向来看,该数据集可广泛应用于多个具身智能研发场景:其一可用于工业分拣、仓储物流领域的机器人指定物品抓取算法训练,优化红色包裹、红色元器件等特定物品的抓取成功率;其二可作为多视角视觉融合技术的基准测试数据集,支撑机器人多传感器标定、3D环境感知、抓取路径规划等技术的研发;其三可用于小样本学习、迁移学习等前沿方向的验证,降低相关算法研发的基础数据采集成本。
作为数据要素市场的核心组成部分,垂直场景AI训练数据集的开源供给,是推动AI技术普惠、降低产业研发门槛的重要基础。本次Kunhsiang将该数据集首发于HuggingFace开源社区,也将进一步推动具身智能领域的开放协作,加速机器人抓取相关技术的落地迭代。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)