

近年来,具身智能已成为全球AI领域的核心发力赛道,不同于通用大模型依赖文本、图像等成熟公开数据,具身智能系统的训练高度依赖机器人在真实/仿真环境中产生的运动控制、环境感知、人机交互等多维度专属数据。但长期以来,机器人领域的训练数据普遍存在采集成本高、格式标准不统一、跨主体流通性差的痛点,大大抬高了中小团队、科研机构的研发门槛。为破解这一问题,HuggingFace此前专门推出LeRobot机器人学习专用数据集格式标准,针对机器人多模态数据的存储、读取、训练需求做了专项优化,目前已成为全球机器人研发领域的主流通用格式之一,有效降低了不同团队之间的数据共享、算法迁移成本。
本次开发者ethanCSL发布的0504-byebye,正是完全适配LeRobot格式的专业机器人数据集,于2026年5月4日率先在全球最大的AI开源社区HuggingFace首发,相关数据集信息也已同步在专业数据服务平台上线,用户可通过链接查询详情:查看0504-byebye
作为开源社区为数不多的标准化机器人训练数据集,0504-byebye的应用场景覆盖多个人形机器人、具身智能核心研发方向:可用于人形机器人步态优化算法训练、机械臂自主抓取路径规划、具身智能体环境交互能力迭代、多模态人机交互模型研发等多个场景,能够为相关研发团队省去大量原始数据采集、格式标准化处理的成本,尤其适配高校科研团队、中小创业团队的算法验证与原型研发需求。
Dataset card内容:
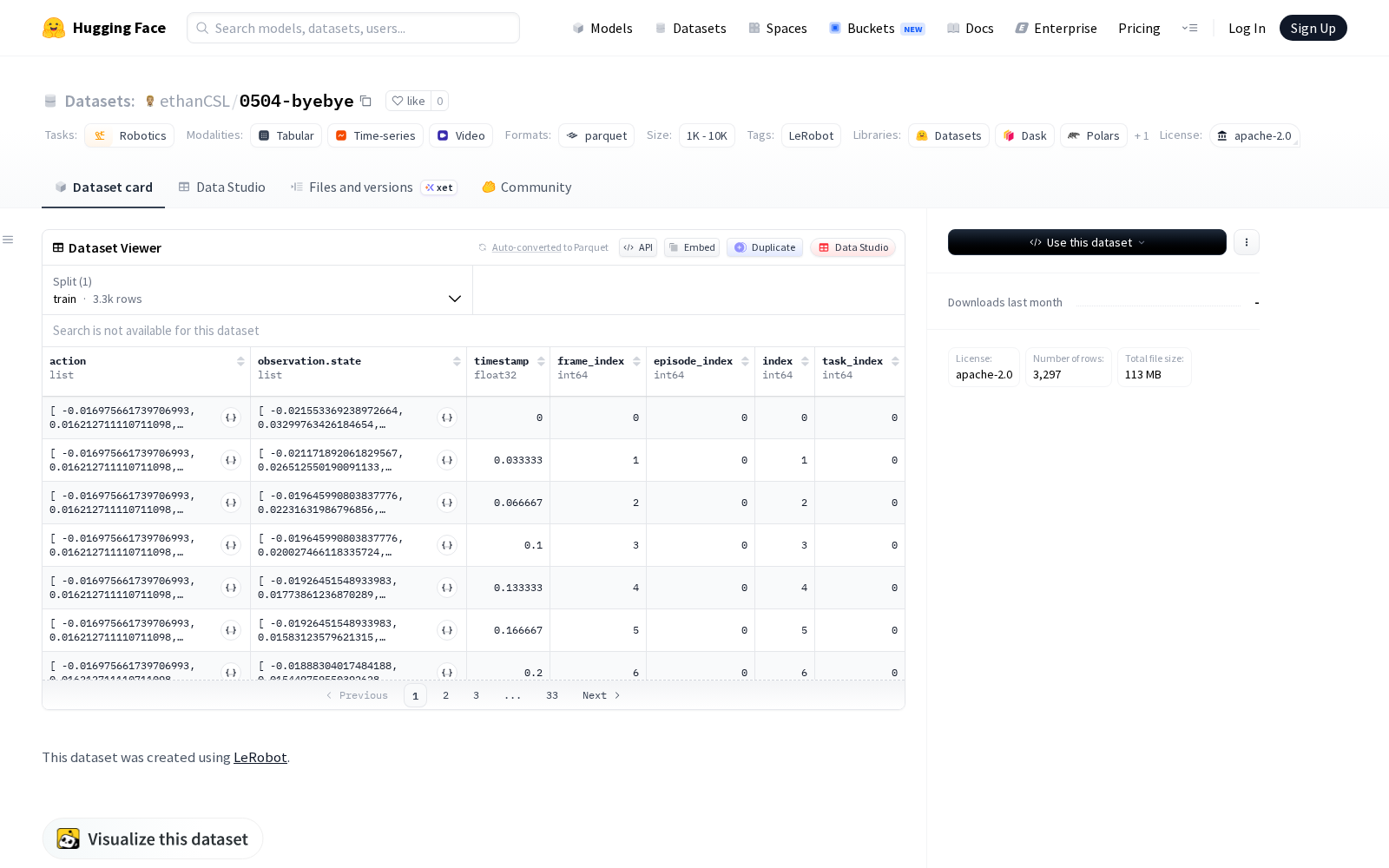
从公开的数据集卡片信息可以看到,该数据集包含机器人多模态感知、运动控制等多维度的标注数据,标注规则完全符合LeRobot格式规范,研发者可直接接入现有训练框架使用,无需额外做格式适配处理。
Files and versions内容:
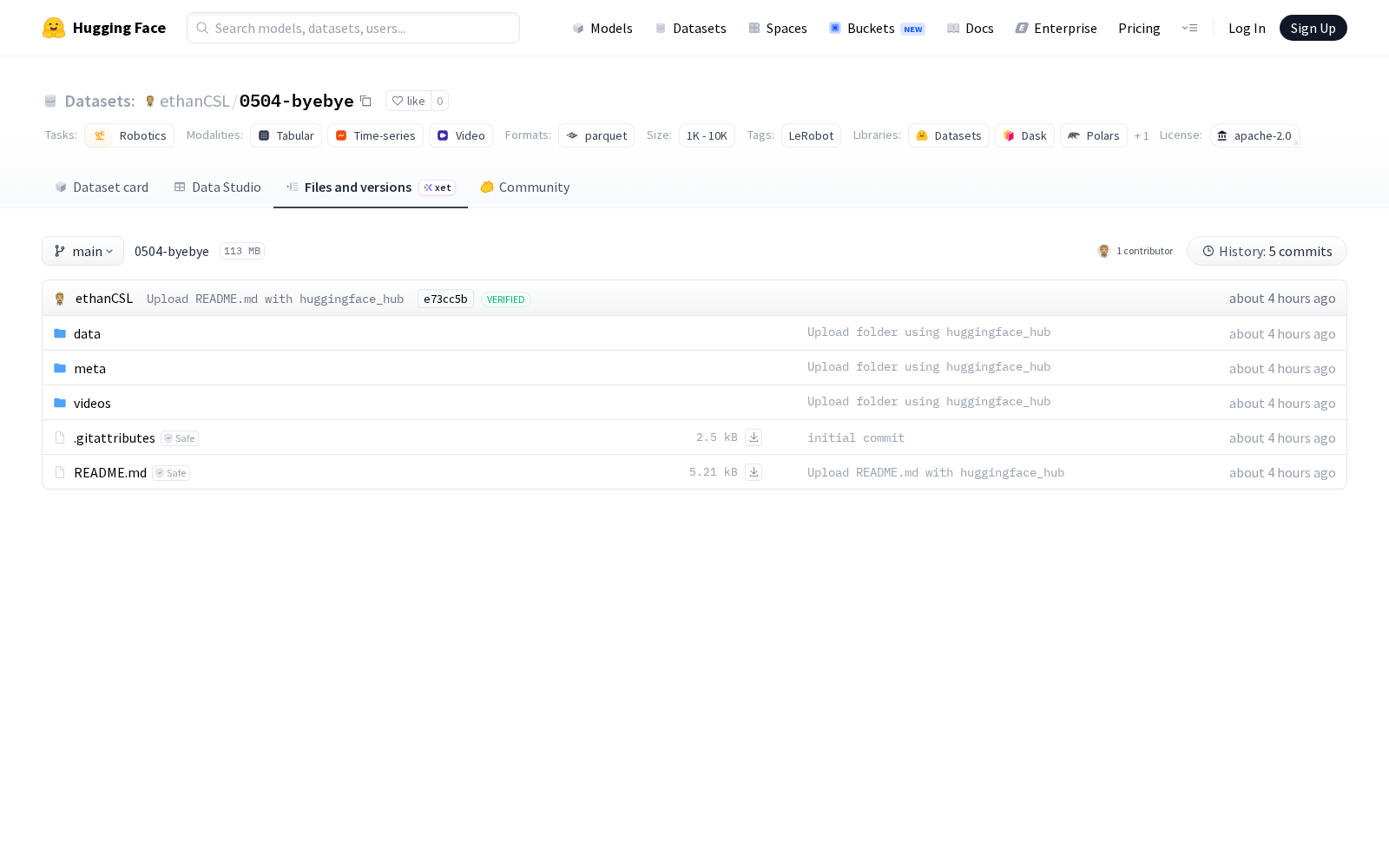
当前公开的版本信息显示,本次上线的为0504-byebye V1.0首发版本。在数据要素成为AI产业核心生产资料的当下,开源社区产出的标准化专业数据集是对商用数据集供给的重要补充,本次0504-byebye数据集的发布,进一步丰富了LeRobot格式的机器人训练数据供给池,对于降低具身智能研发门槛、推动开源机器人生态建设、加速具身智能技术从实验室走向落地场景都具备积极意义。



_1769672084863.jpg)