

当前,全球人形机器人产业正处于从实验室研发向商业化场景落地的关键过渡阶段,手部精细操作能力是决定人形机器人能否适配工业、服务、家庭等多元场景的核心指标,而标准化、高质量的动作训练数据集,是支撑机器人手部控制算法迭代的核心基础。作为HuggingFace面向机器人领域推出的专用数据集标准,LeRobot格式凭借统一的结构定义、良好的框架兼容性,已经成为全球机器人研发团队跨机构数据共享、模型迁移训练的主流载体,有效解决了此前机器人数据集格式不统一、复用成本高的行业痛点。
2026年5月4日,专业机器人基准数据集服务平台tavis-benchmark正式对外发布tavis-hands-gr1t2专项数据集,这也是国内为数不多的、完全兼容HuggingFace LeRobot格式的公开机器人手部动作数据集,目前已率先在HuggingFace平台首发上线。
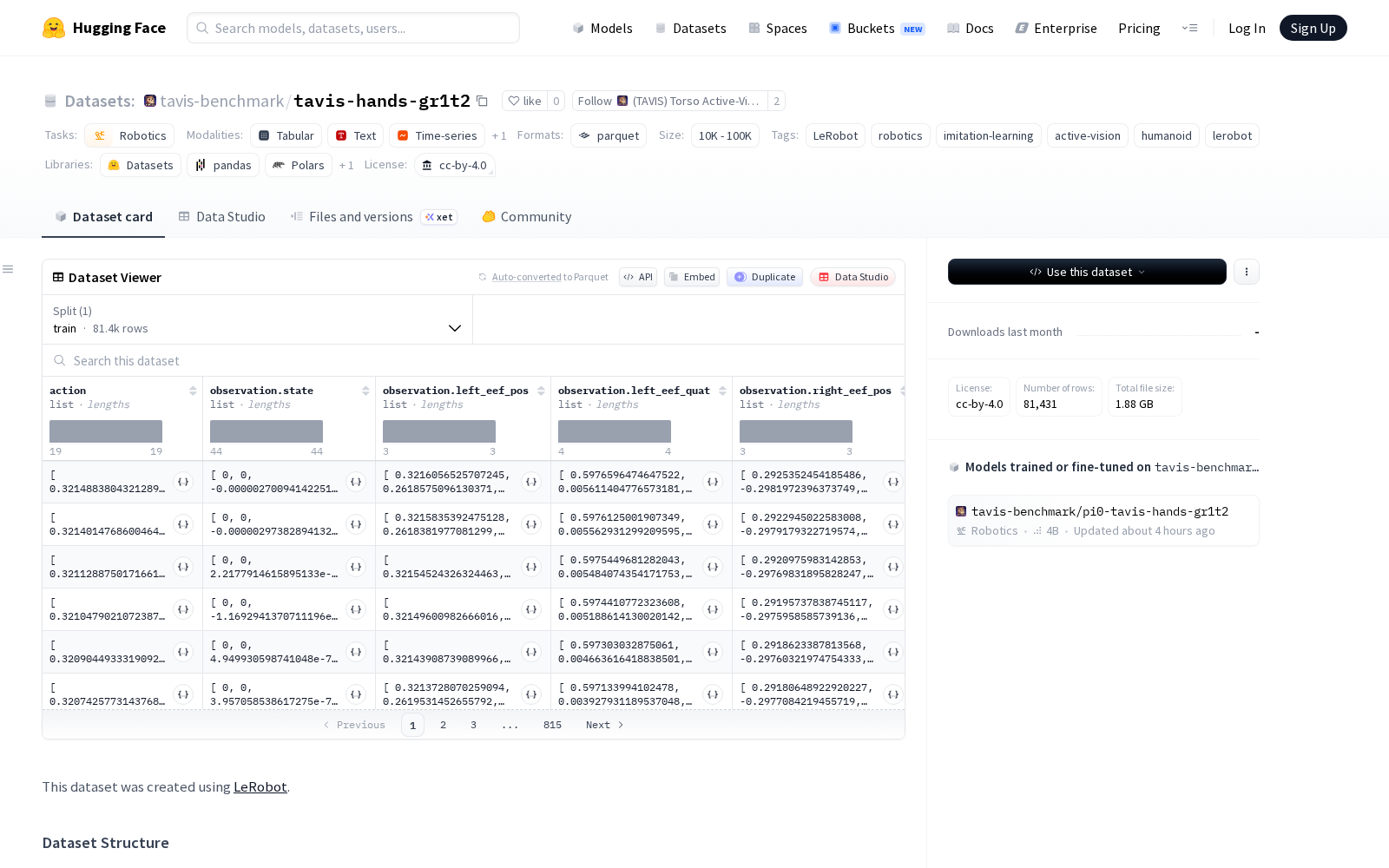
Dataset card内容:
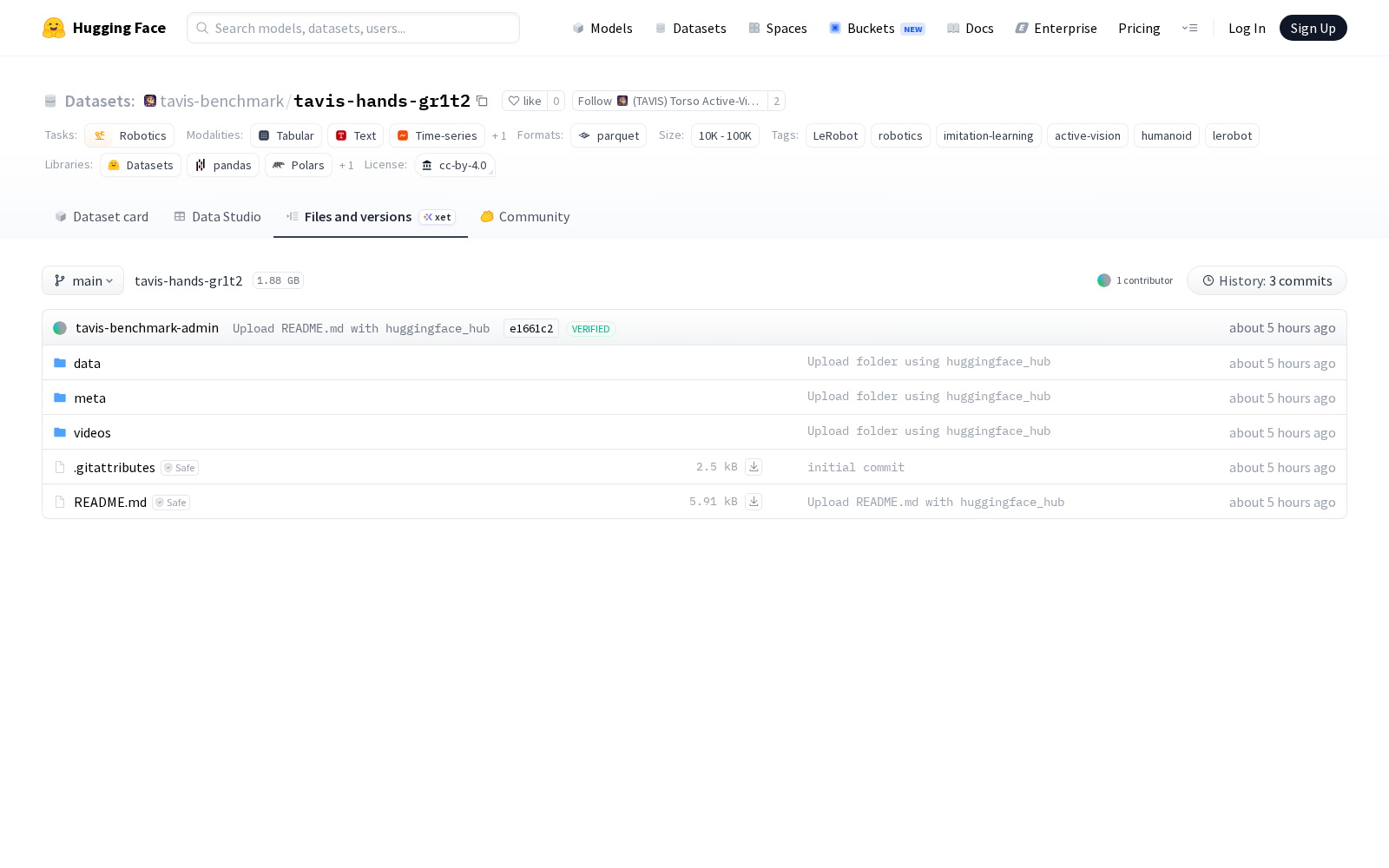
Files and versions内容:
从公开的数据集信息来看,tavis-hands-gr1t2数据集聚焦机器人手部动作维度的原始数据采集,可为相关研发团队提供标准化的训练基准。从行业应用方向来看,该类手部动作数据集可广泛应用于多个典型场景:在工业制造领域,可支撑工业人形机器人完成零部件抓取、精密装配等场景的动作模型训练,提升产线机器人的操作精度与适配效率;在服务场景中,可助力服务机器人优化物品传递、设备操作、助老助残等日常动作的流畅度与精准度;此外还可应用于机器人柔性触觉传感器算法校准、数字孪生场景下的机器人动作仿真、人机协同操作系统开发等多个研发方向。
作为人工智能领域重要的垂直类训练数据资源,机器人专用标准化数据集的不断丰富,是完善数据要素供给体系、推动实体产业数字化转型的重要组成部分。此次tavis-hands-gr1t2数据集的发布,不仅填补了国内LeRobot格式手部动作公开数据集的供给缺口,也将进一步降低国内人形机器人研发团队的底层数据采集成本,缩短算法迭代周期,加速通用人形机器人技术的落地迭代进程,为我国机器人产业的技术创新提供重要的基础数据支撑。



_1769672084863.jpg)