

随着通用机器人、工业机械臂等领域的技术迭代,场景化、多模态的高质量标注数据集已成为制约机器人感知与控制算法落地的核心瓶颈之一。尤其涉及物理世界操作任务的数据集,需要同步覆盖视觉观测、运动参数、时序对应等多维度标注,采集与标注成本较高,行业供给长期存在缺口。
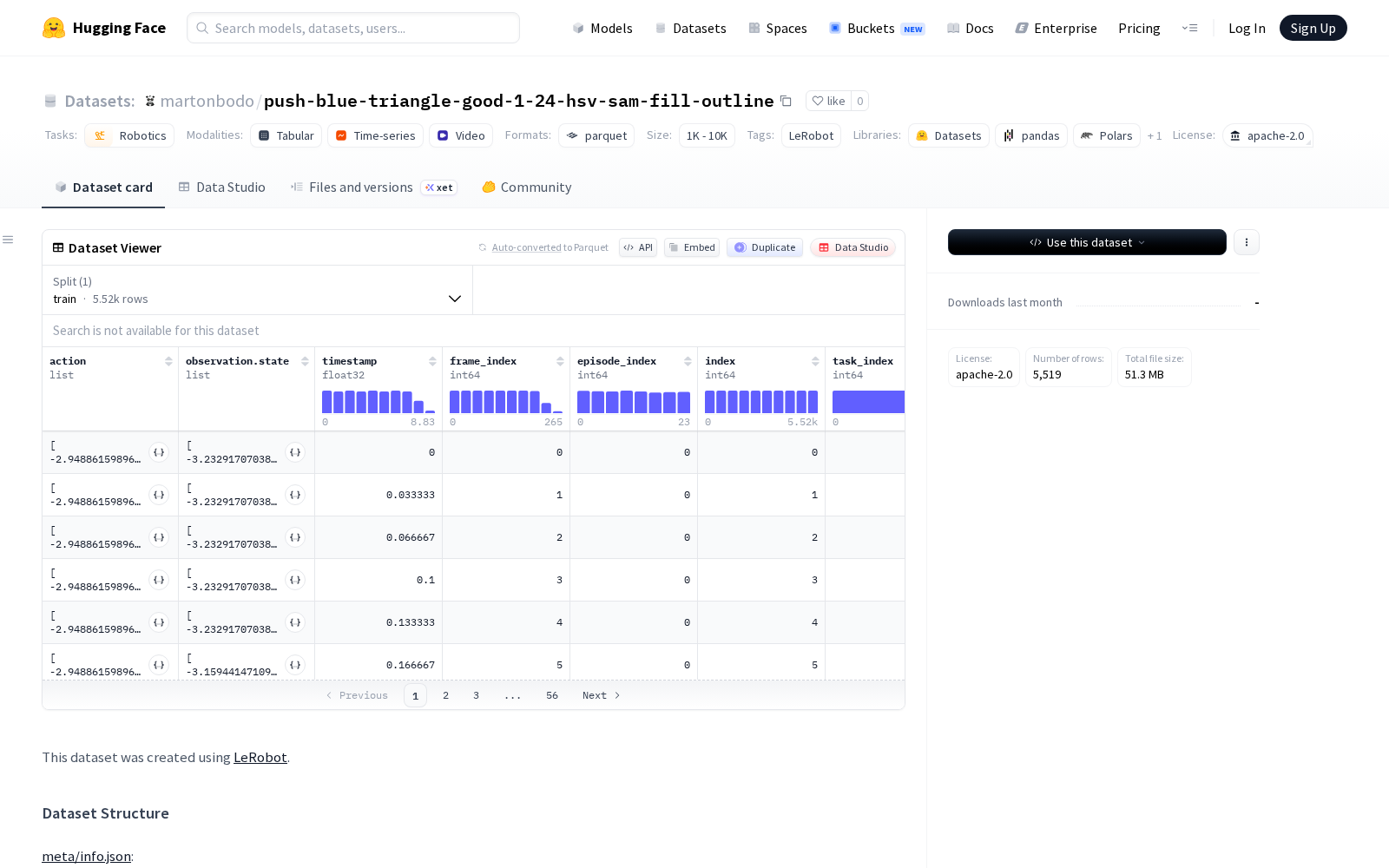
本次martonbodo发布的push-blue-triangle-good-1-24-hsv-sam-fill-outline数据集由机器人开源项目LeRobot创建,是专门面向机器人基础操作场景研发的标注数据集,于2026年5月4日首发于全球知名AI开源社区HuggingFace,主要服务于机器人视觉感知、动作控制领域的技术研发。该数据集共包含24组完整的机器人操作任务序列(episodes)、5519帧标注数据,仅设置1项核心任务,所有结构化标注数据以parquet格式存储,原始视频素材采用mp4格式封装,兼顾数据读取效率与溯源需求。其标注特征覆盖机器人操作全链路核心维度:包括动作(action)字段记录机器人关节控制参数、观察状态(observation.state)标注机器人实时位姿信息、图像观察(observation.images.eagle和observation.images.side)同步提供俯拍、侧拍双视角的操作场景画面,此外还配套了时间戳(timestamp)、帧索引(frame_index)、episode索引(episode_index)、索引(index)和任务索引(task_index)等字段,方便研发人员按需快速调取对应维度的训练数据。
查看push-blue-triangle-good-1-24-hsv-sam-fill-outline
从应用价值来看,该数据集聚焦机器人“推送目标物体”这一基础操作任务,具备极高的场景复用价值:可用于工业机械臂的物料分拣、流水线工位操作算法训练,帮助提升机械臂的感知精度与动作控制稳定性;也可为家庭服务机器人的物品整理、人机协同操作模型优化提供训练素材,降低机器人在真实家庭场景的操作失误率;此外还可用于多模态机器人大模型的微调,强化大模型对物理世界操作逻辑的理解能力。
作为AI产业的核心生产要素,垂直场景的高质量标注数据集是技术落地的核心底座。本次专用数据集的开源发布,将有效降低机器人研发团队的基础数据采集与标注成本,对于加快通用机器人技术商业化落地、完善机器人领域开源数据生态都具有积极意义。
Dataset card内容:
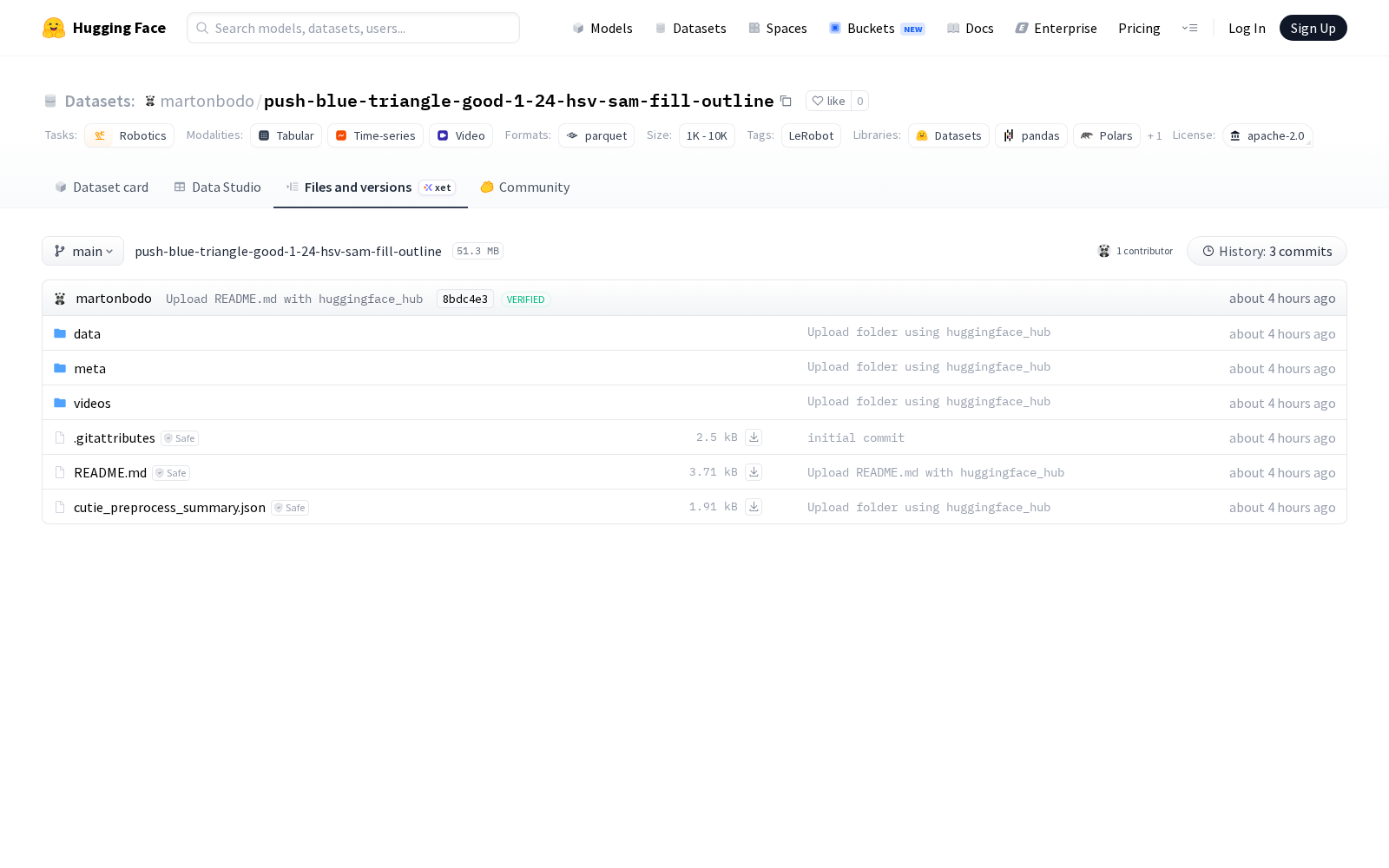
Files and versions内容:



_1769672084863.jpg)