

当前全球具身智能产业正进入技术落地关键期,高质量、标准化的机器人操作训练数据,是制约研发效率、降低应用门槛的核心要素。作为HuggingFace面向机器人学习领域推出的统一数据格式,LeRobot格式打通了数据与开源训练框架的适配链路,可帮助研发团队省去大量数据清洗、格式转换的前置工作,因此也成为当下机器人领域最受认可的开源数据集标准之一。
radoolonto本次发布的数据集peg_rand_05_01_tool_xyz_3j_cam0_1,为标准HuggingFace LeRobot格式机器人数据集,于2026年5月5日首发上线HuggingFace平台,面向全球开发者开放获取。
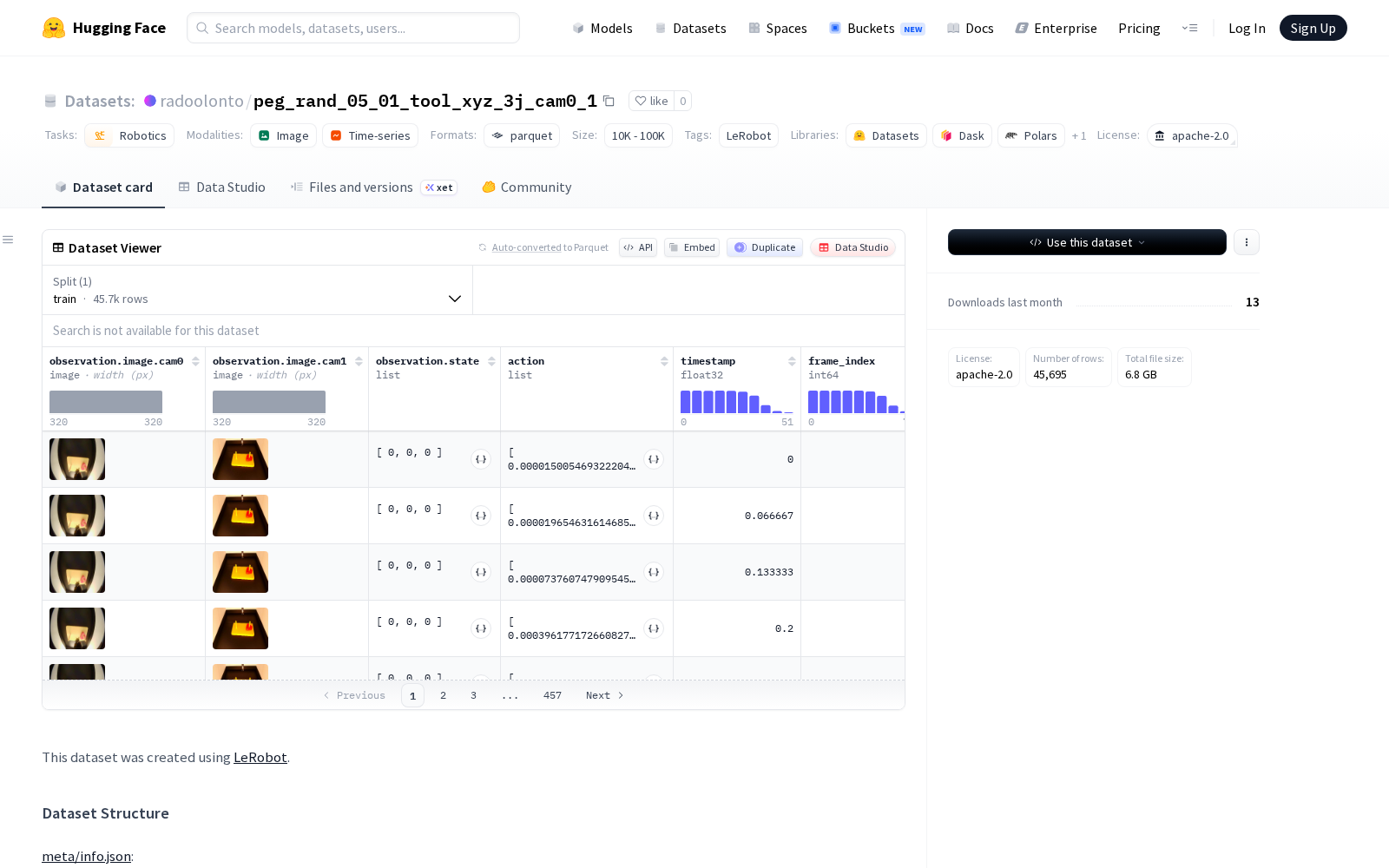
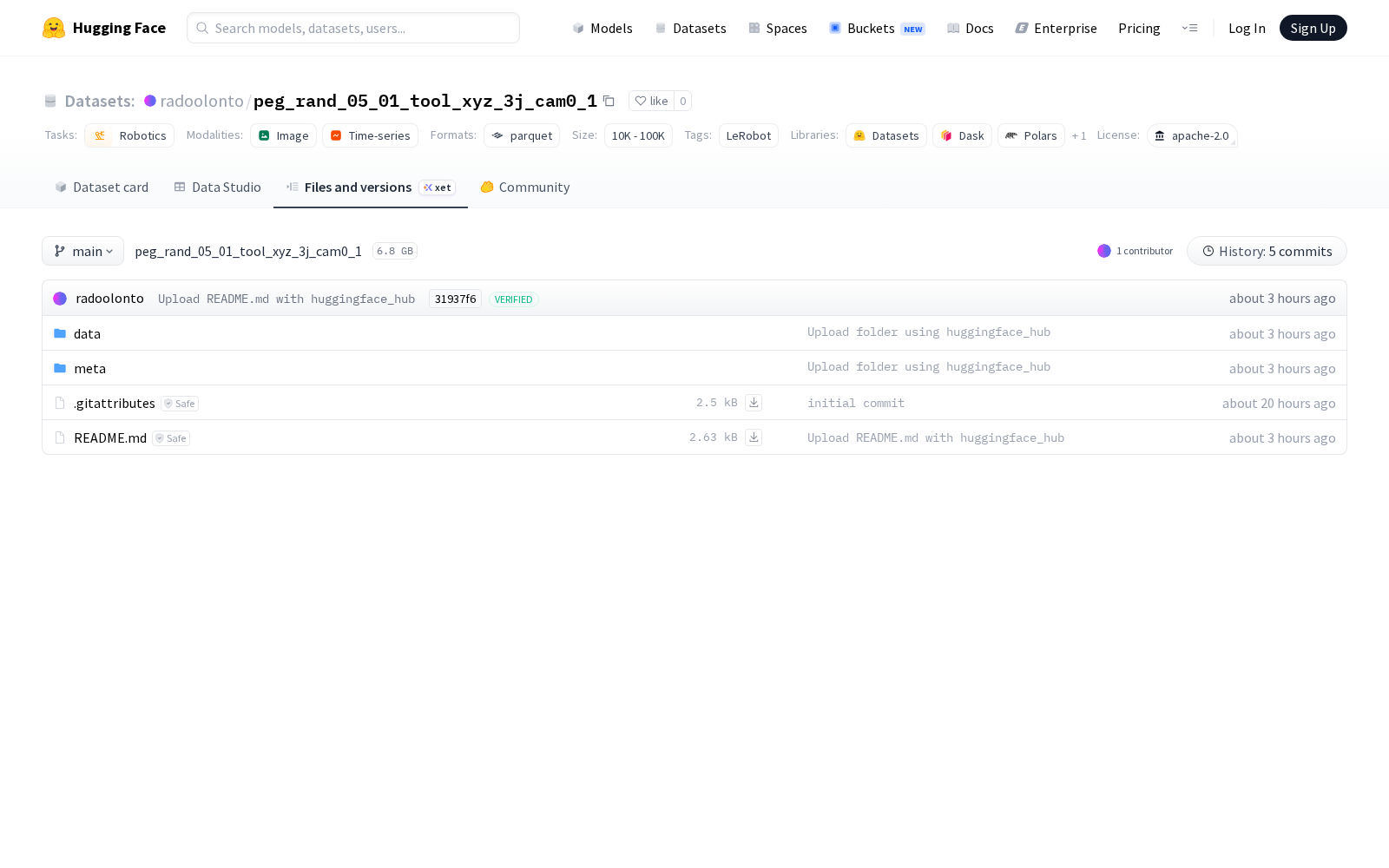
查看peg_rand_05_01_tool_xyz_3j_cam0_1
Dataset card内容:
Files and versions内容:
从数据集命名标识来看,该数据集为机械臂操作场景下的单目视觉采集数据,涵盖工具交互、空间位姿移动等核心场景内容,可广泛应用于机械臂轨迹规划、柔性抓取训练、目标物体识别定位、具身智能体环境感知等多个研发方向。相较于非标准化的散点数据集,该款LeRobot格式数据集可直接适配HuggingFace生态下的多款机器人学习预训练模型,研发团队可直接调用数据开展训练工作,研发效率可得到显著提升。
业内人士指出,当前全球LeRobot生态下的细分场景数据集供给仍存在较大缺口,尤其是工业级工具操作类的视觉数据集供给相对不足,本次radoolonto发布的相关数据集,既丰富了全球机器人开源数据的供给池,也为国内数据服务商参与全球AI开源生态建设提供了参考样本,对降低中小团队具身智能研发门槛、推动技术普惠具有积极意义。随着数据要素市场与人工智能产业的深度融合,这类标准化、场景化的开源数据集供给,将成为支撑AI技术快速落地的核心基础设施之一。



_1769672084863.jpg)