

当前全球通用机器人技术正处于商业化落地的关键攻坚期,机器人的自主运动控制、复杂环境感知、人机交互能力的迭代,高度依赖高标注质量的场景化训练数据。长期以来,面向实体机器人的多模态标注数据供给稀缺、采集成本高,已经成为制约中小研发团队技术创新、行业整体迭代效率的核心瓶颈之一。
近日,开发者maximellerbach在全球知名AI开源社区HuggingFace正式上线由LeRobot创建的rollout_tmp_20260505_133828数据集,瞄准机器人控制、多模态感知两大核心研发场景补全开源数据供给。
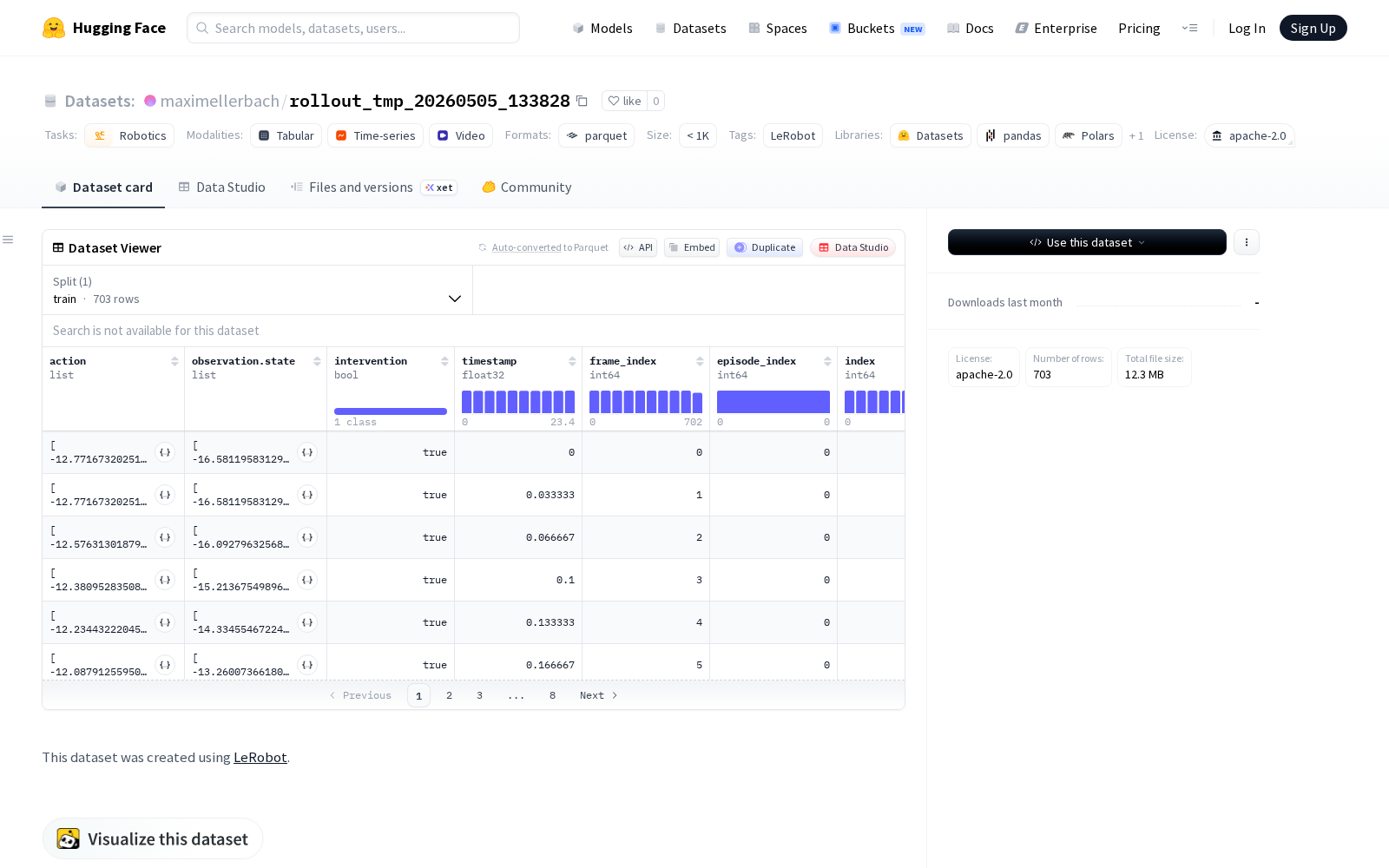
据公开信息显示,本次发布的数据集覆盖多维度机器人运行特征,包含机器人动作参数、观察状态(含关节位置等核心运动数据)、手腕与顶部双视角的图像视频素材、干预标记、时间戳、帧索引、任务索引等标注内容;存储格式方面采用大数据领域通用的parquet格式存储结构化数据,视频内容采用兼容性更强的mp4格式封装,帧率为30fps,整体数据集包含1个任务、1个完整运行片段,共703帧标注数据。
从应用价值来看,该数据集可广泛应用于机器人技术研发的多个场景:在机器人控制方向,研发人员可基于数据集中的关节位置、连续动作序列标注,训练机器人运动控制算法,优化动作执行的精准度与流畅度,减少实体机器人实机训练过程中的硬件损耗与测试成本;在多模态感知方向,手腕与顶部双视角的视觉素材搭配对应时刻的运动状态标注,可用于训练机器人的视觉定位、环境感知、动态避障等能力,同时可为多模态大模型在实体机器人端的落地适配提供场景化训练素材。
作为机器人领域的细分场景开源数据集,该数据集的上线一方面降低了中小研发团队的训练数据获取门槛,另一方面也为机器人领域不同算法的效果横向对标提供了统一的测试基准,对完善全球机器人开源生态、推动数据要素在人工智能实体化落地领域的价值释放具有积极意义。
Dataset card内容:
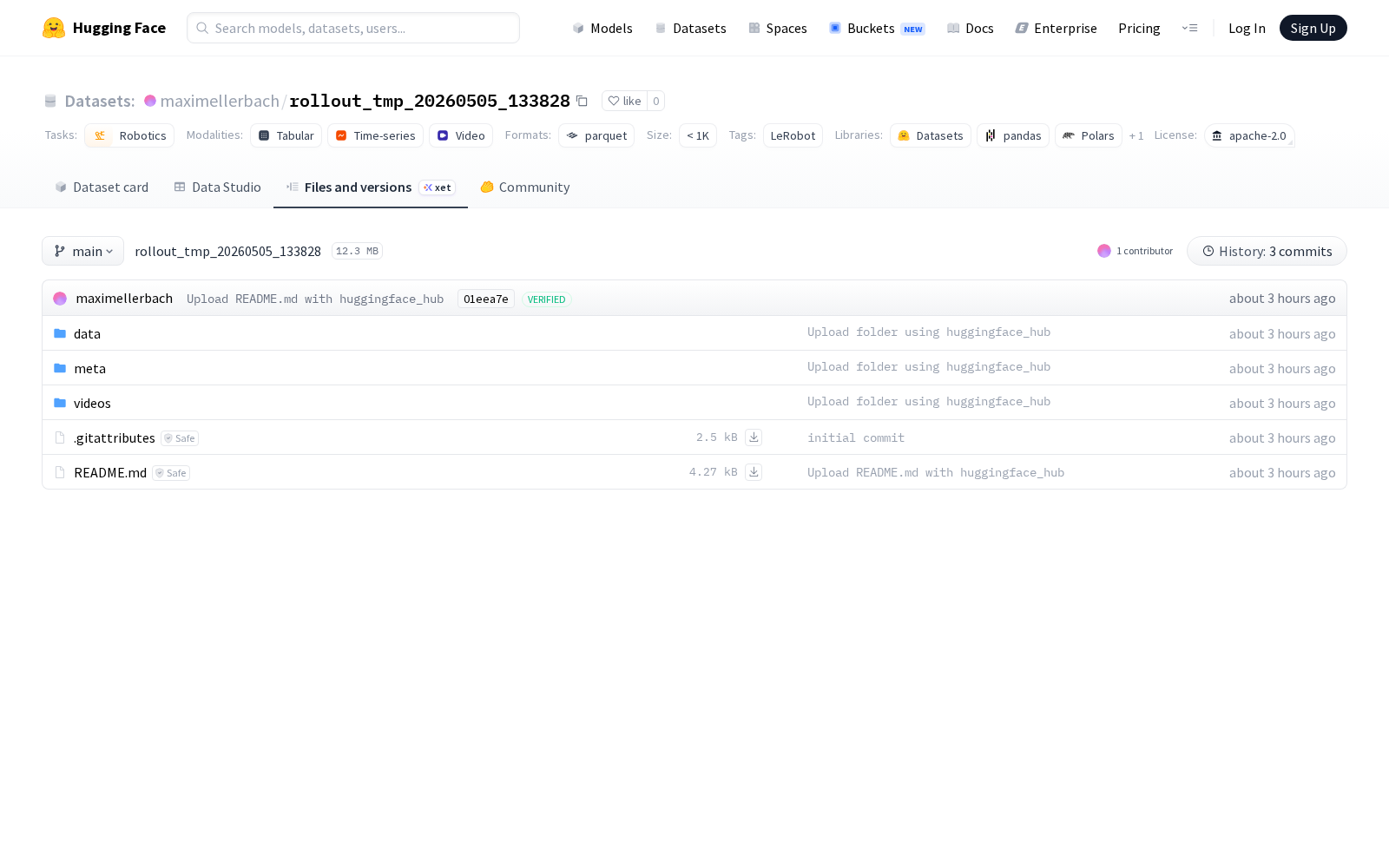
Files and versions内容:



_1769672084863.jpg)