

当前具身智能已成为人工智能领域的核心落地方向,全球科技企业与研发团队都在加快相关技术布局,但行业普遍面临标准化训练数据不足的瓶颈:传统机器人数据集多由不同团队按需定制,标注规则、存储格式差异极大,跨主体复用需要耗费大量清洗、适配成本。2023年HuggingFace推出的LeRobot开源项目,定义了覆盖机器人学习全流程的统一数据集规范,大幅降低了数据流通与复用门槛,已成为行业主流的机器人数据标准。zeicul本次发布的数据集data_2cam_10ep_luz,正是严格遵循该标准打造的机器人专业数据集,可直接接入所有适配LeRobot规范的训练框架使用。
Dataset card内容:
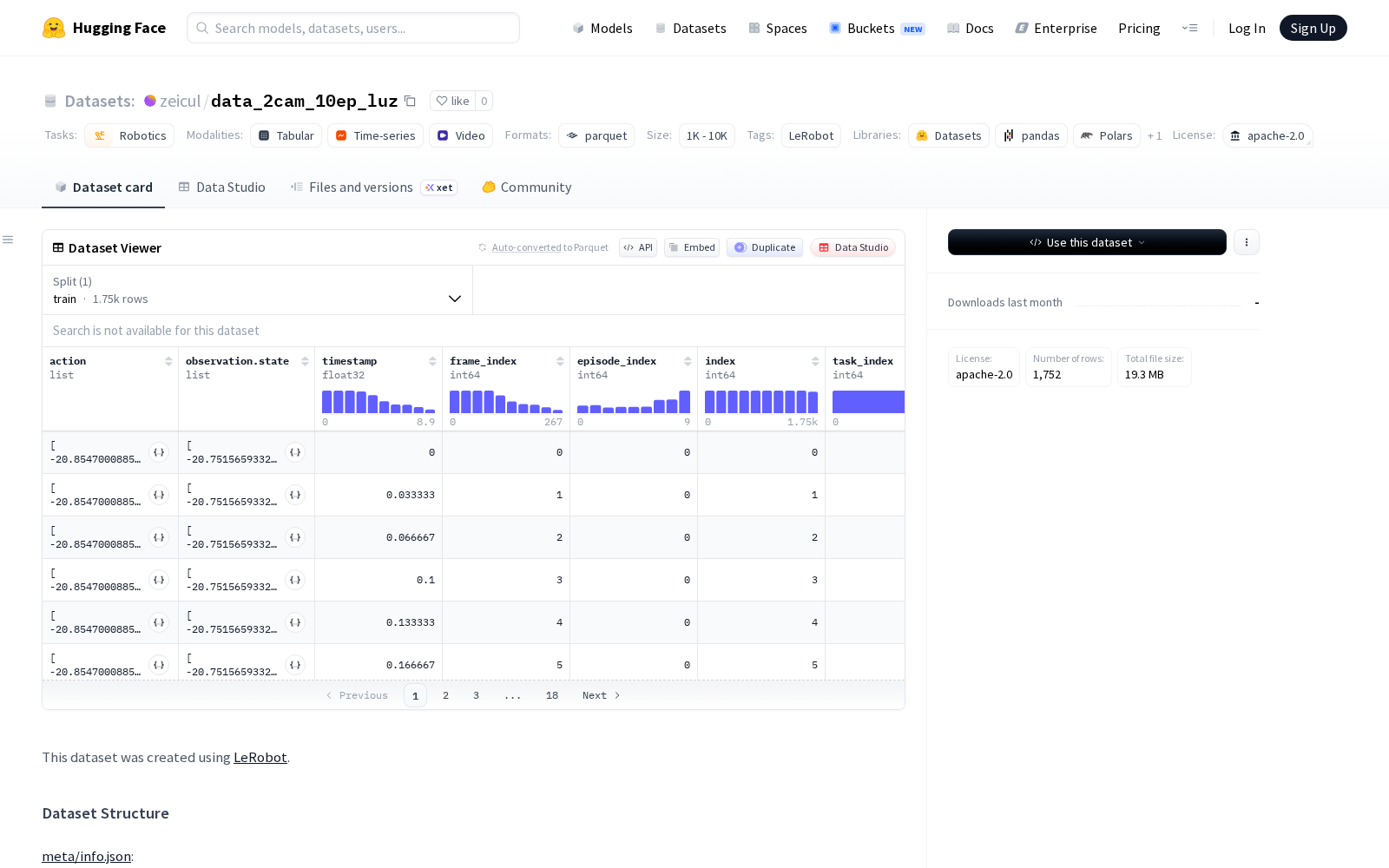
从公开的数据集卡片信息来看,该数据集命名中的“2cam”指代双摄像头采集方案,可同时输出不同视角的视觉帧数据,为机器人空间定位、深度感知任务提供更精准的训练素材;“10ep”指代数据集覆盖10个完整的机器人任务执行周期,包含从指令下发到动作执行完成的全流程数据;“luz”则指代数据集覆盖多光照条件场景,包含强光、弱光、自然光等不同光照环境下的采集样本,可有效提升训练模型在复杂真实环境下的鲁棒性,所有数据均完成了帧级标注与空间位姿对齐,无需额外处理即可用于模型训练。
Files and versions内容:
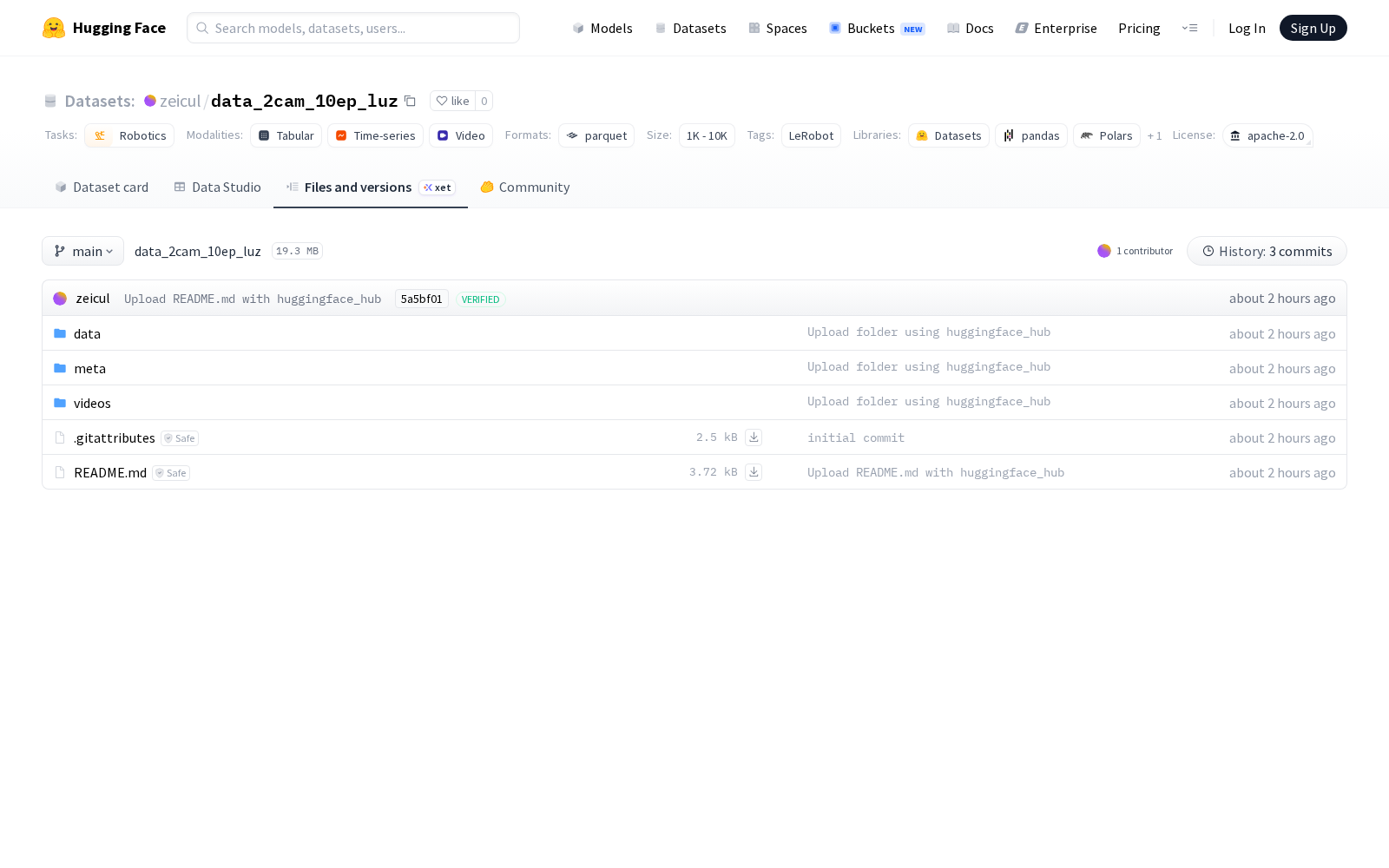
公开的文件版本信息显示,该数据集同时提供原始帧数据、预处理后的数据两个版本,研发团队可根据自身训练需求灵活选择,所有数据均已完成脱敏处理,不存在个人隐私或涉密信息,可面向全球非商用研发场景开放使用。
作为标准化的机器人视觉数据集,data_2cam_10ep_luz可广泛应用于多个具身智能研发场景:一是室内服务机器人的导航避障算法训练,多光照、双视角的数据可有效提升机器人在家庭、办公场景下的环境适应能力;二是人形机器人、协作机器人的操作任务训练,双视角的视觉数据可对齐机械臂的空间位姿,大幅提升抓取、组装等精细操作的成功率;三是多模态大模型的具身能力微调,该数据集的动作-视觉对齐数据可帮助大模型建立语言指令与真实空间动作的映射关系;此外,该数据集还可作为基准数据集,用于机器人视觉算法、域适应算法的效果验证,帮助研发团队降低自有数据采集的成本投入。
当前我国数据要素市场建设持续推进,垂直领域高质量AI数据集是人工智能产业发展的核心基础资源,本次zeicul发布的标准化机器人数据集,不仅丰富了国内开源AI数据资源池,也为行业参与者践行“开放共享、协同创新”的研发模式提供了参考,对加速我国具身智能产业的技术落地、降低中小团队的研发门槛具有积极的推动作用。



_1769672084863.jpg)