

当前,具身智能作为下一代人工智能的核心落地方向,正处于从实验室原型向商业化场景渗透的关键阶段,而高质量、标准化的细分场景训练数据集,是制约机器人学习算法迭代效率、降低研发门槛的核心基础资源。为解决全球机器人研发团队的数据格式不统一、复用成本高的痛点,HuggingFace此前推出了LeRobot专属机器人数据集规范,统一了机器人感知数据、动作标签、环境参数、交互记录等核心字段的存储标准,目前已成为全球机器人学习领域的主流通用数据格式之一。
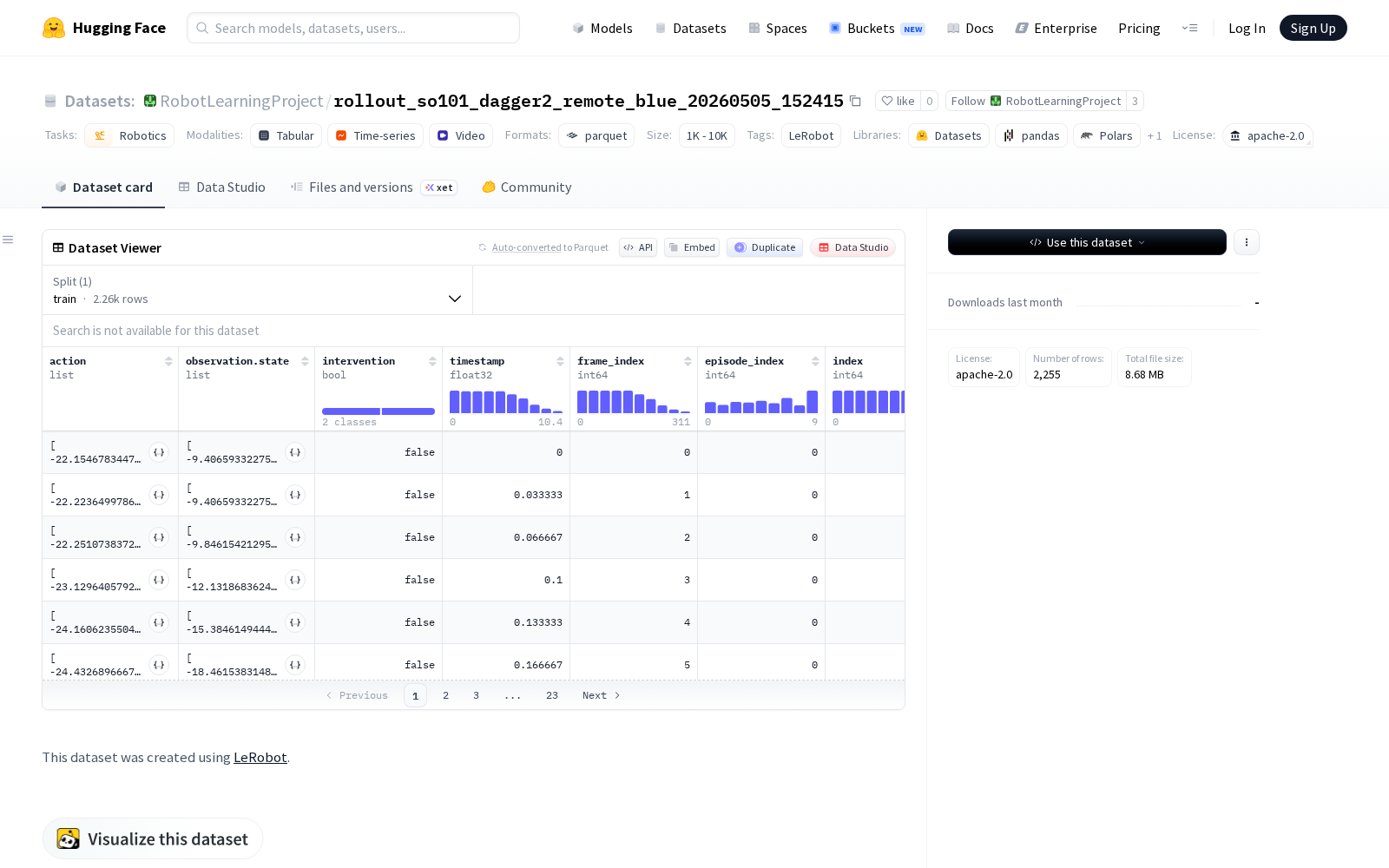
RobotLearningProject本次发布的数据集rollout_so101_dagger2_remote_blue_20260505_152415,即为严格适配LeRobot格式的专用机器人训练数据集,于2026年5月5日正式首发上线HuggingFace平台。从命名规则可判断,该数据集采用机器人模仿学习领域主流的DAgger(数据集聚合)算法框架采集,聚焦远程操控类机器人的蓝色作业场景(通常指代工业装配、物流搬运、运维巡检等蓝领劳动替代场景),覆盖了真实作业环境下的多模态感知输入、动作指令映射、异常场景响应等核心数据维度。
查看rollout_so101_dagger2_remote_blue_20260505_152415
按照机器人学习领域的通用数据应用逻辑,该数据集未来可被广泛应用于多个研发场景:一是可用于模仿学习算法的训练与效果验证,帮助研发人员优化机器人从人类演示中自主学习动作策略的效率;二是可支撑远程遥操作机器人的响应时延与精度优化,提升复杂场景下远程操控机器人的作业稳定性;三是可用于工业场景下机器人的动作泛化能力测试,验证算法在非结构化作业环境中的适配表现;四是可为多模态机器人交互系统的性能迭代提供训练素材,支撑融合视觉、力觉、语音等多维度输入的机器人操控模型研发。
此次数据集的开放,是全球机器人学习领域数据要素共享生态的重要补充,随着越来越多标准化细分场景机器人数据集的开放共享,将有效降低中小研发团队的训练数据获取成本,加速具身智能技术从实验室原型到商业化落地的进程,为工业、物流、公共服务等多个领域的机器人应用落地提供底层数据支撑。
Dataset card内容:
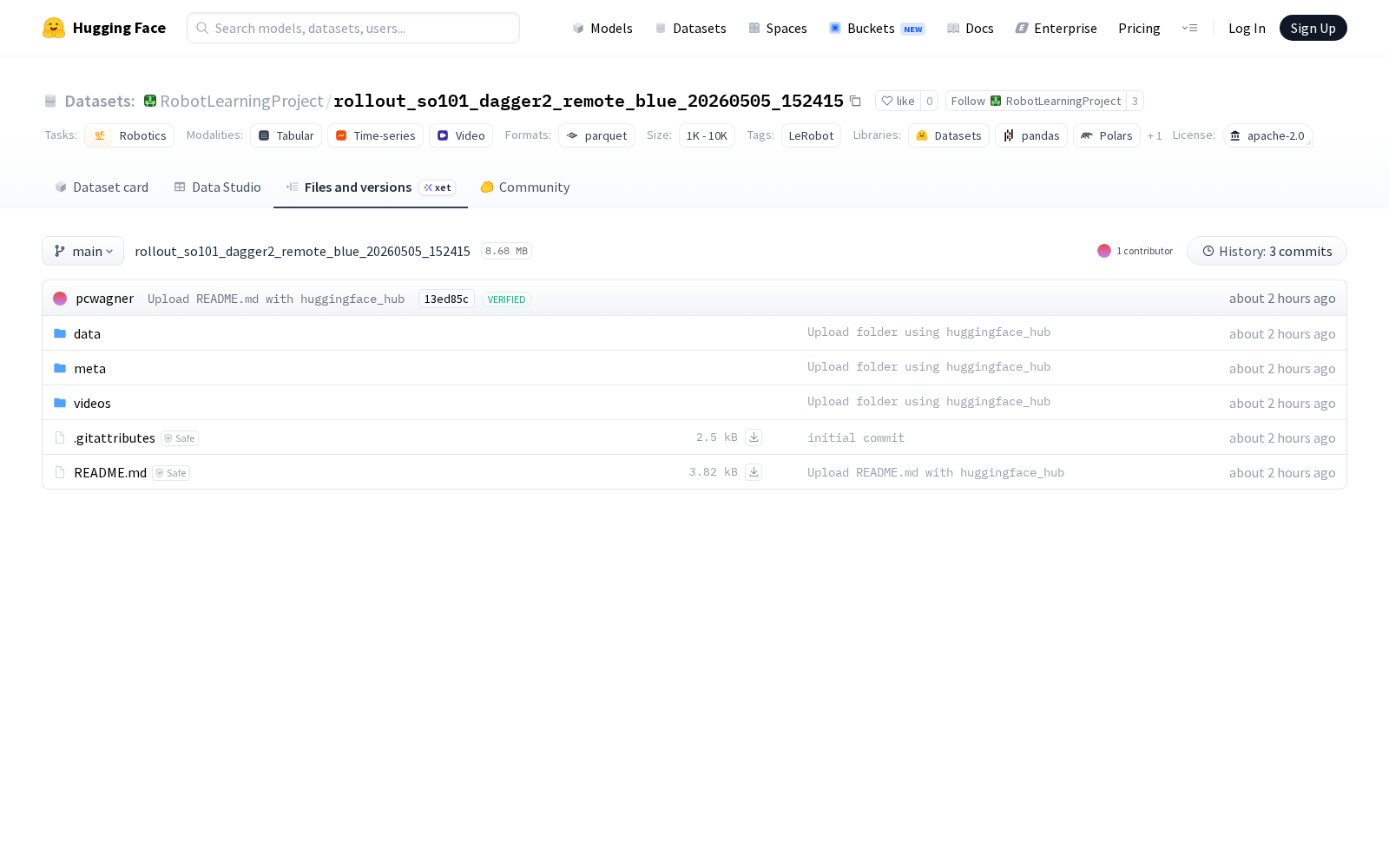
Files and versions内容:



_1769672084863.jpg)