

随着具身智能与商用机器人产业进入快速落地期,高质量、多维度标注的场景化数据集已成为支撑机器人算法迭代的核心基础设施——由于机器人操作数据涉及运动状态、视觉信号、动作指令等多模态维度的同步采集与标注,行业长期面临优质开源数据供给不足的痛点,大幅抬高了中小研发团队与科研机构的技术验证门槛。
近日,开发者Jonathan Giegold正式在Hugging Face平台首发由LeRobot创建的loop-pi05-robosuite-4机器人技术专项数据集,进一步丰富了全球机器人研发领域的开源数据供给。
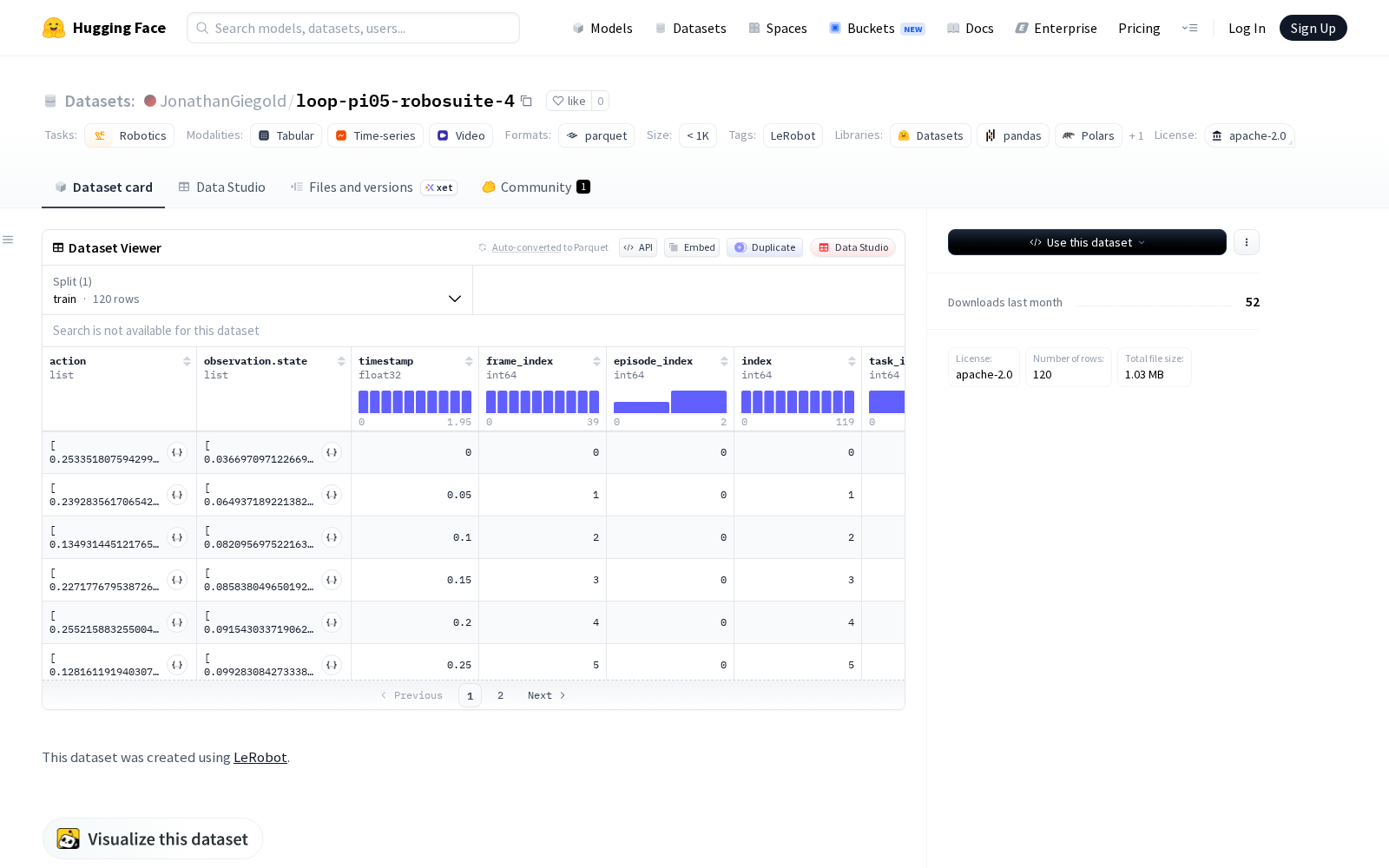
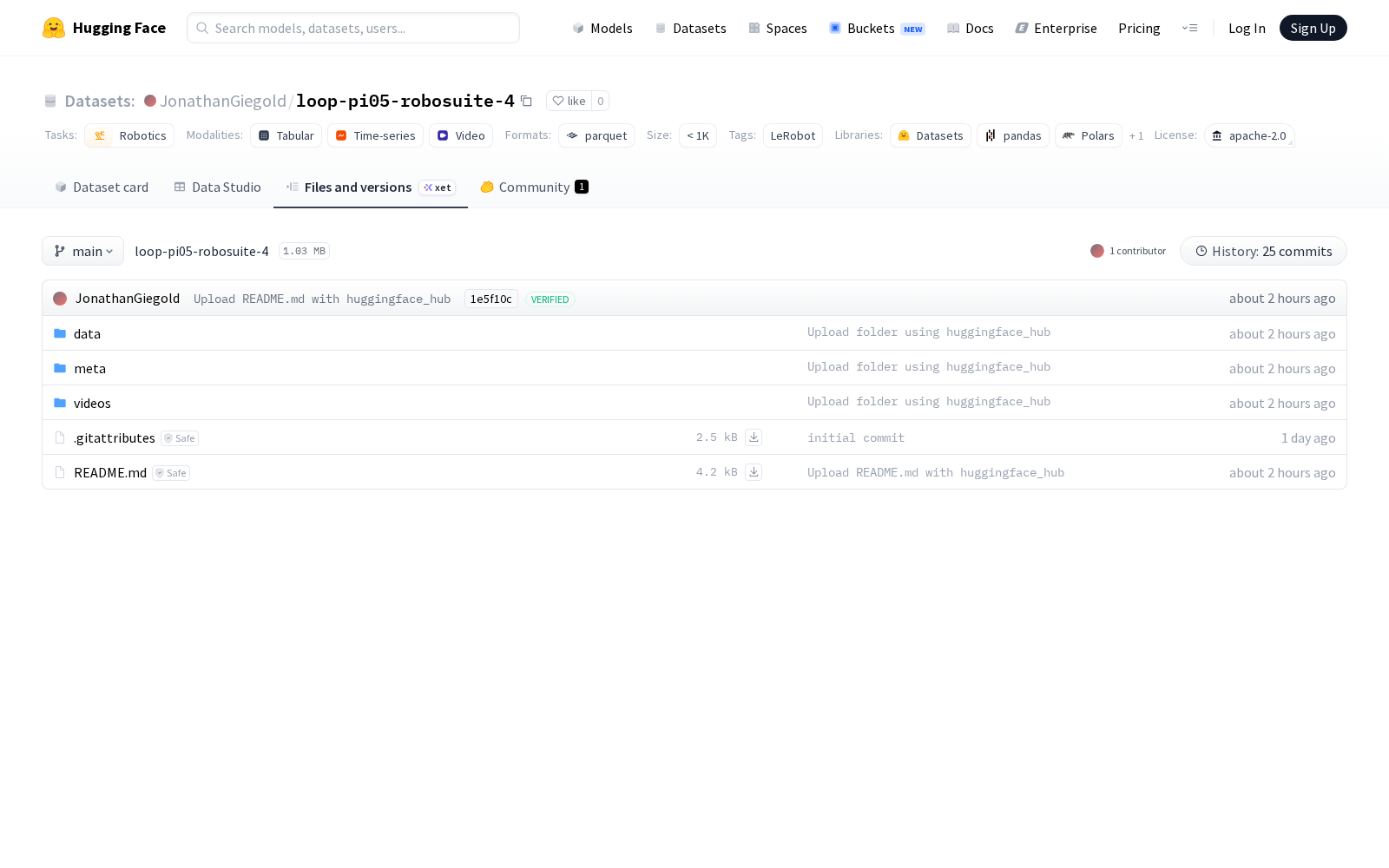
据公开信息显示,loop-pi05-robosuite-4数据集结构包含结构化数据文件、视频文件两类载体,覆盖三大类核心标注特征:其一为机器人动作标注,包含7个关节位置与夹持器位置的指令数据;其二为观察状态标注,包含9个关节位置与夹持器位置的实际运行状态数据,两类数据对应可支撑算法对运动控制偏差的校准优化;其三为多视角图像数据,包含机器人代理视图与手腕视图的同步画面,可满足视觉感知算法的训练需求。本次发布的数据集共包含3个片段、120帧数据,对应帧率为20fps,其中数据文件大小为100MB,视频文件大小为200MB,整体采用Apache-2.0开源许可证,支持开发者自由修改、分发与商用,大幅降低了版权使用门槛。
从应用方向来看,该数据集可广泛适配机器人领域的多类研发需求:在操作控制领域,研发人员可基于动作指令与实际运行状态的对应标注,优化机械臂轨迹规划、夹持力度控制等算法的精度,降低运动偏差;在视觉感知领域,多视角同步图像可支撑场景识别、工件定位、夹持状态判断等视觉伺服技术的迭代;此外该数据集规模适中、标注维度完善,也可作为小样本学习、迁移学习算法的标准测试集,验证算法在单一特定任务下的泛化能力。
Dataset card内容:
Files and versions内容:
作为人工智能领域的核心生产要素,垂直场景的高质量开源数据集是推动技术普惠的核心支撑,本次loop-pi05-robosuite-4数据集的发布,进一步补全了机器人操作细分领域的开源数据供给体系,为全球相关领域的研发人员提供了便捷、低门槛的基础数据选项,也将间接助力具身智能、工业机器人等相关产业的技术迭代与落地。



_1769672084863.jpg)