

当前全球具身智能、工业移动机器人赛道正处于快速落地期,标准化的场景训练数据已成为制约算法迭代效率的核心瓶颈之一。尤其在拾取放置这类机器人核心操控场景,不同团队采集的数据格式不统一、场景覆盖度不足,往往需要研发团队投入大量成本完成数据清洗、格式转换工作,大幅拉长了模型研发周期。
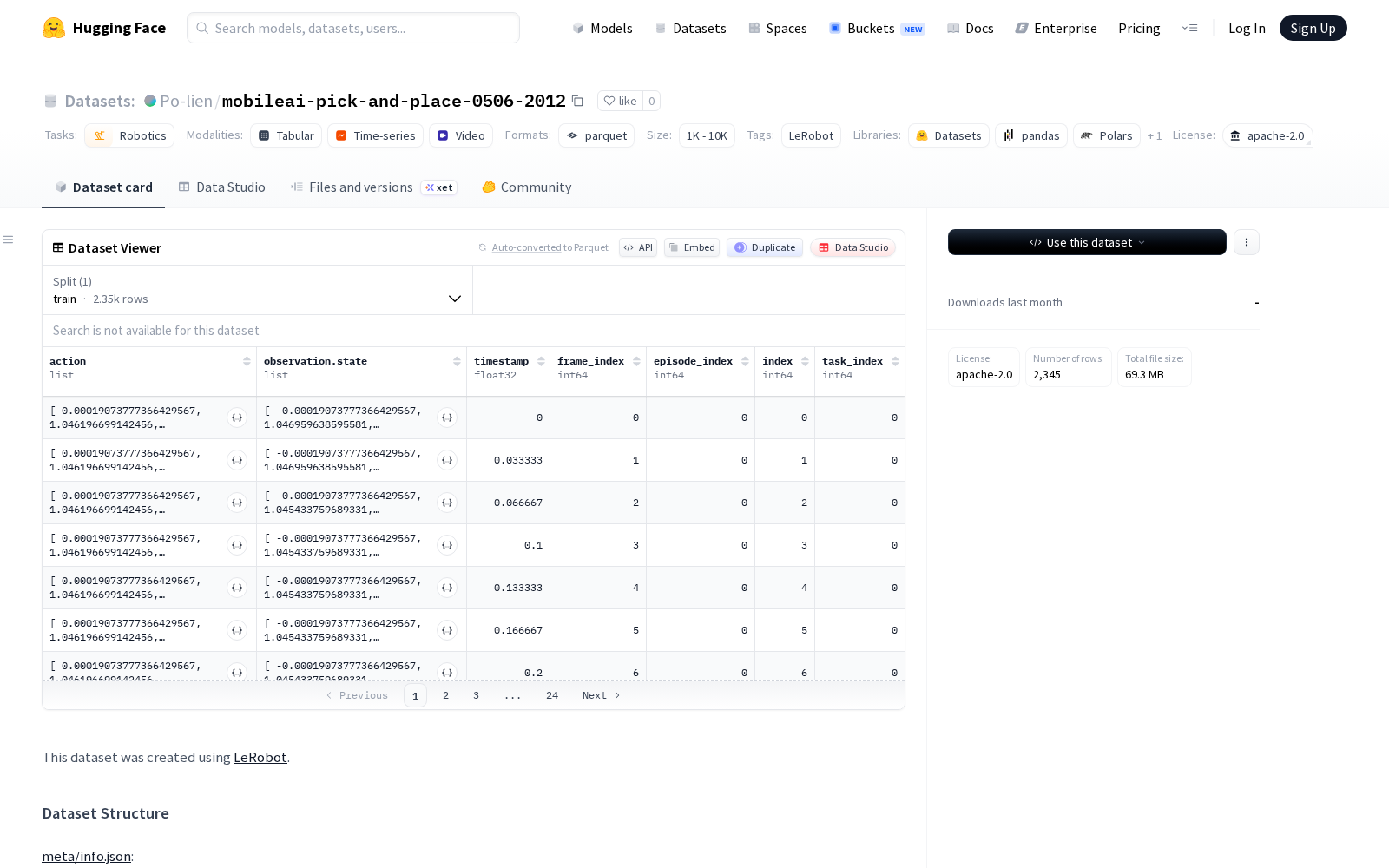
近日,技术贡献者Po-lien正式发布名为mobileai-pick-and-place-0506-2012的机器人场景数据集,该数据集于2026年5月6日首次上线HuggingFace平台,且完全适配HuggingFace LeRobot标准格式,是当前公开领域为数不多符合该国际主流机器人数据规范的拾取放置类数据集。
据行业公开信息显示,LeRobot是HuggingFace面向机器人学习领域推出的通用数据格式与开发工具集,目前已被全球数千个机器人研发团队、高校科研团队采用,适配该格式的数据集可直接接入主流机器人训练框架,无需额外完成格式适配工作,可帮助研发团队降低至少30%的数据集预处理成本。
Po-lien本次发布的数据集mobileai-pick-and-place-0506-2012,该数据集为HuggingFace LeRobot格式机器人数据集。
查看mobileai-pick-and-place-0506-2012
从应用方向来看,该数据集可广泛覆盖多个机器人与移动AI研发场景:典型应用包括工业生产环节的零部件分拣拾取机器人算法训练、仓储物流场景的自动拣货移动机器人路径规划与操作精度优化、动态复杂环境下的具身智能模型操控能力微调、家庭服务机器人的物品抓取功能迭代等,对于降低移动AI与机器人领域的研发门槛有着显著价值。
Dataset card内容:
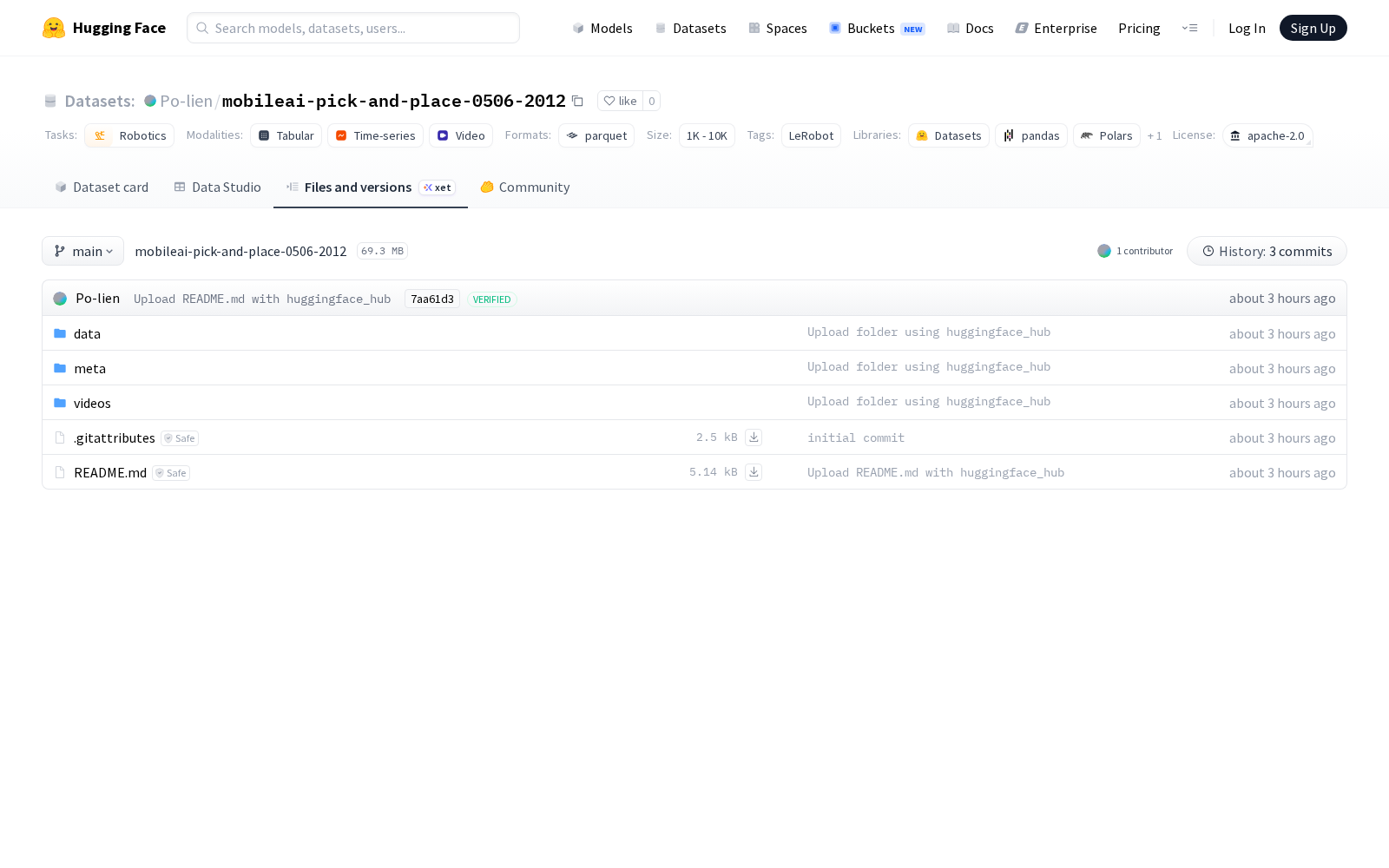
Files and versions内容:
业内分析指出,随着数据要素市场向垂直科技场景渗透,面向具身智能、工业机器人等前沿赛道的垂直场景数据集供给正在成为新的行业热点,符合国际通用标准的公开数据集的不断涌现,将进一步完善我国前沿AI领域的训练数据供给体系,为数字经济核心产业的创新发展提供底层数据支撑。



_1769672084863.jpg)