

随着具身智能产业进入商业化落地关键期,工业协同机器人、家庭服务机器人、特种作业机器人等产品正在快速渗透到生产生活的各类真实场景,人机共融已成为机器人技术迭代的核心方向。但长期以来,支撑机器人策略训练的主流演示数据集几乎全部在人类缺席的封闭实验环境中采集,导致训练出的算法难以适配有人场景下的动态变化,在安全避让、作业节奏适配、人类意图识别等核心能力上存在明显短板,成为制约人机协作技术大规模落地的核心瓶颈之一。habit-anonymous本次发布的HABIT是行业稀缺的大规模机器人演示数据集,专为人类存在的开放环境设计,核心目标就是为机器人策略训练提供人类感知行为的高质量数据支撑。该数据集填补了现有数据集几乎完全在人类缺席环境中收集的空白,所有采集片段均覆盖人类与机器人共享工作空间的真实场景,任务按照三种交互角色组织,可完整捕捉不同类型的人机交互模式,同时包含丰富的人类和机器人子任务级注释,数据标注颗粒度能够满足多场景算法训练需求。HABIT通过引入人类存在作为数据集多样性的新维度,将机器人策略的适用边界从封闭无人环境拓展至人机共享的开放场景,其典型应用方向覆盖多个高价值领域:在工业制造场景中,可支撑协同机器人的动态感知算法训练,让机器人在装配、搬运等作业中主动识别工人动作、调整作业路径,既避免人机碰撞安全事故,也能适配工人作业节奏提升整体生产效率;在服务场景中,可为配送机器人、陪护机器人的行为策略训练提供数据支撑,让机器人能够准确感知人类活动意图,主动避让、响应需求,提升人机交互的流畅度;在特种作业场景中,也能为消防、救援等场景的人机协同作业算法研发提供数据参考,支撑机器人配合救援人员完成复杂环境下的作业任务。从数据要素产业维度来看,场景化高质量数据集是AI技术迭代的核心底座,HABIT数据集的发布不仅为人机协作领域的技术研发提供了关键数据支撑,也为后续同类数据集的构建提供了新的维度参考,对推动具身智能落地、完善数据要素在人工智能领域的应用生态都具有重要意义。
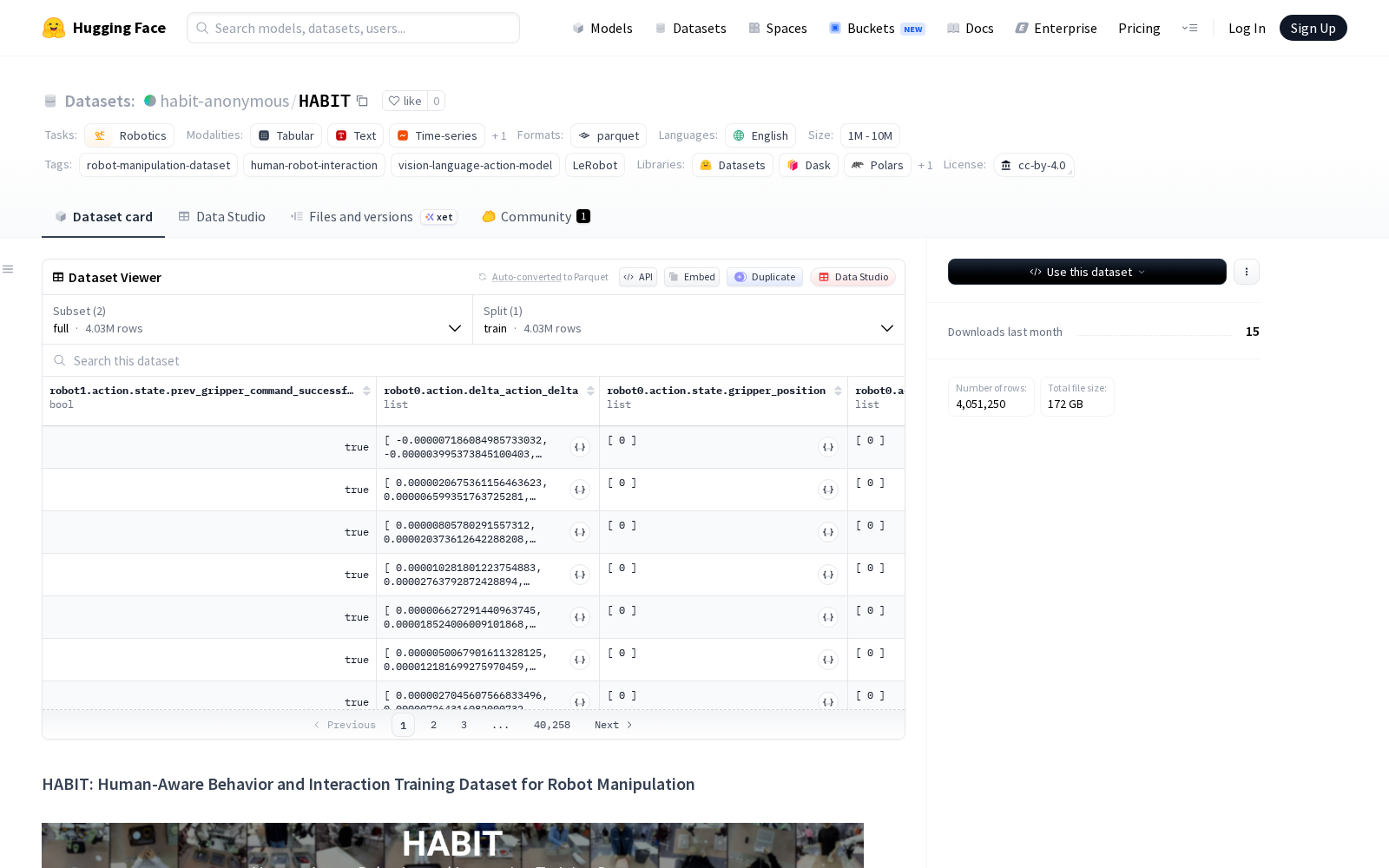
Dataset card内容:
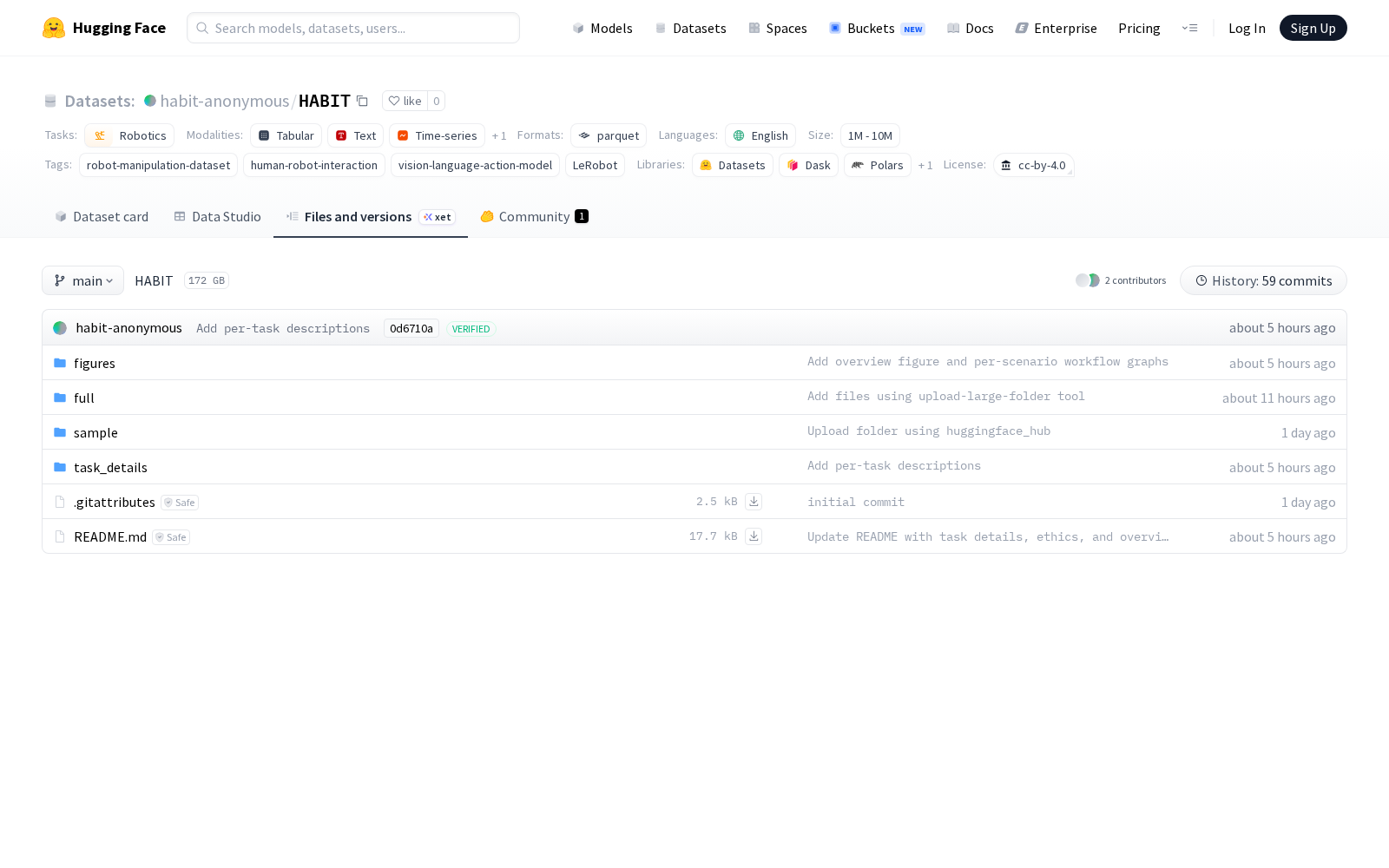
Files and versions内容:



_1769672084863.jpg)