

随着大模型技术向实体场景渗透,具身智能已成为当前人工智能领域的核心落地赛道,移动操作机器人的抓取、分拣能力是其在工业、物流、商业服务等场景落地的核心功能。但长期以来,行业缺乏覆盖真实机器人关节状态、多视角视觉观测的同步对齐标注数据集,大量中小研发团队需要投入高额成本自行采集数据,直接延缓了具身智能技术的落地节奏。
2026年5月6日,数据提供方Po-lien正式在HuggingFace平台首发mobileai-pick-and-place-0506-2113数据集,该数据集由LeRobot创建,定向面向机器人抓取操作、视觉动作控制领域的研发需求打造。
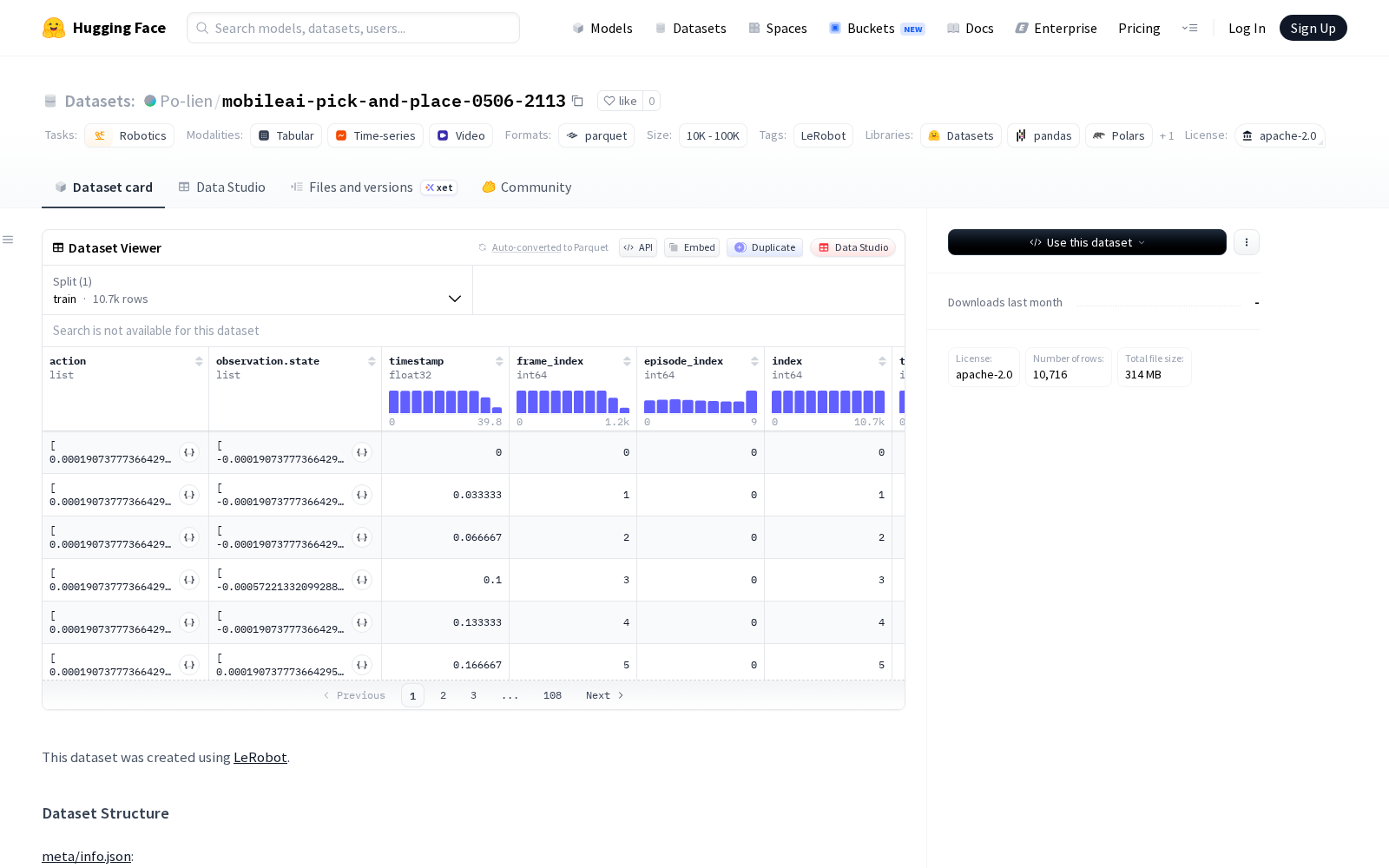
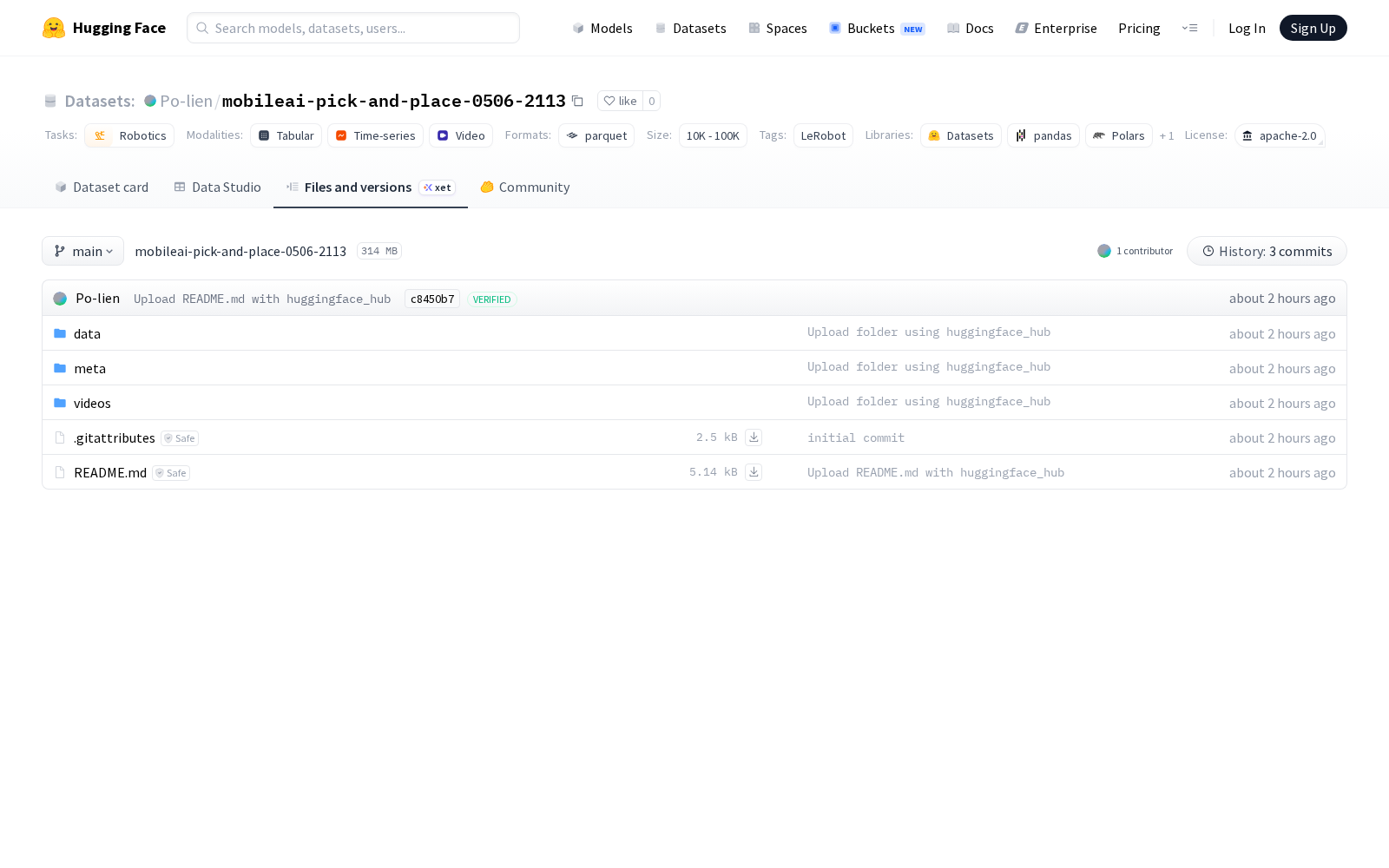
据介绍,该数据集共包含10个episodes和10716帧数据,完整记录了移动AI机器人的三类核心数据:一是16维关节位置和速度构成的动作数据,二是16维机器人自身观察状态数据,三是来自高视角、左腕、右腕三个机位的同步视频观察数据。所有视频分辨率为480x640,帧率30fps,结构化数据以parquet格式分块存储,结构化总数据量100MB,配套视频数据总大小500MB。
从数据应用场景来看,该数据集实现了动作、状态、视觉三类数据的时间维度精准对齐,可广泛支撑多类具身智能研发需求:首先可用于移动机器人抓取算法训练,针对工业零部件分拣、仓储拆码垛、服务机器人物品递送等场景,研发团队可基于该数据集优化不同形态物品的抓取路径规划、姿态识别精度,提升非结构化场景下的抓取成功率;其次可支撑端到端视觉动作控制模型研发,三类摄像头的同步观测数据与关节运动数据的匹配,可为视觉信号到机器人动作输出的直接映射模型训练提供真值参考,大幅降低机器人控制逻辑的调试成本;此外还可作为机器人仿真与数字孪生场景的校验基准,数据集的真实环境采集参数可帮助研发团队提升虚拟仿真场景的复刻精度,缩小仿真与实机测试的效果差距。
当前国内数据要素市场建设持续推进,AI训练数据作为人工智能产业的核心生产要素,垂直场景的高质量标注数据缺口长期存在,本次数据集的开源发布,为中小研发团队降低了移动操作机器人领域的研发门槛,也为具身智能技术从实验室走向规模化落地提供了重要的基础数据支撑。
查看mobileai-pick-and-place-0506-2113
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)