

当前具身智能产业进入落地爆发期,高质量、多维度的真实交互数据集已成为机器人算法迭代的核心基础设施——尤其是同时覆盖视觉感知、本体状态、动作指令的标注数据集,一直是制约通用机器人落地的核心短板,行业对开源可用的高价值机器人数据集需求持续攀升。
近日,开发者gsethia08正式对外发布part1-color数据集,该数据集由LeRobot打造,于2026年5月6日首发于HuggingFace平台,核心面向机器人技术领域研发需求设计,填补了细分场景下多模态标注数据的供给缺口。
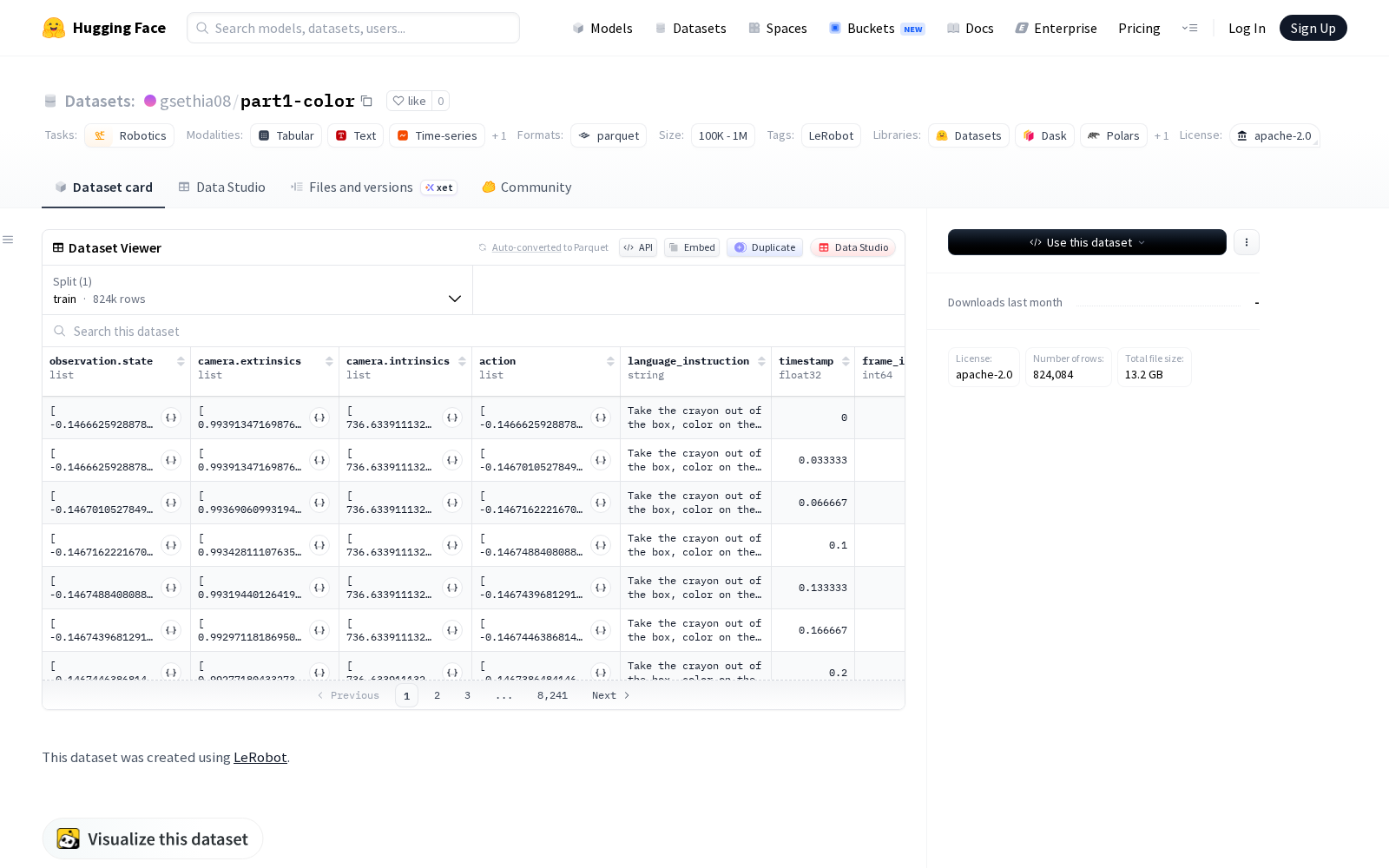
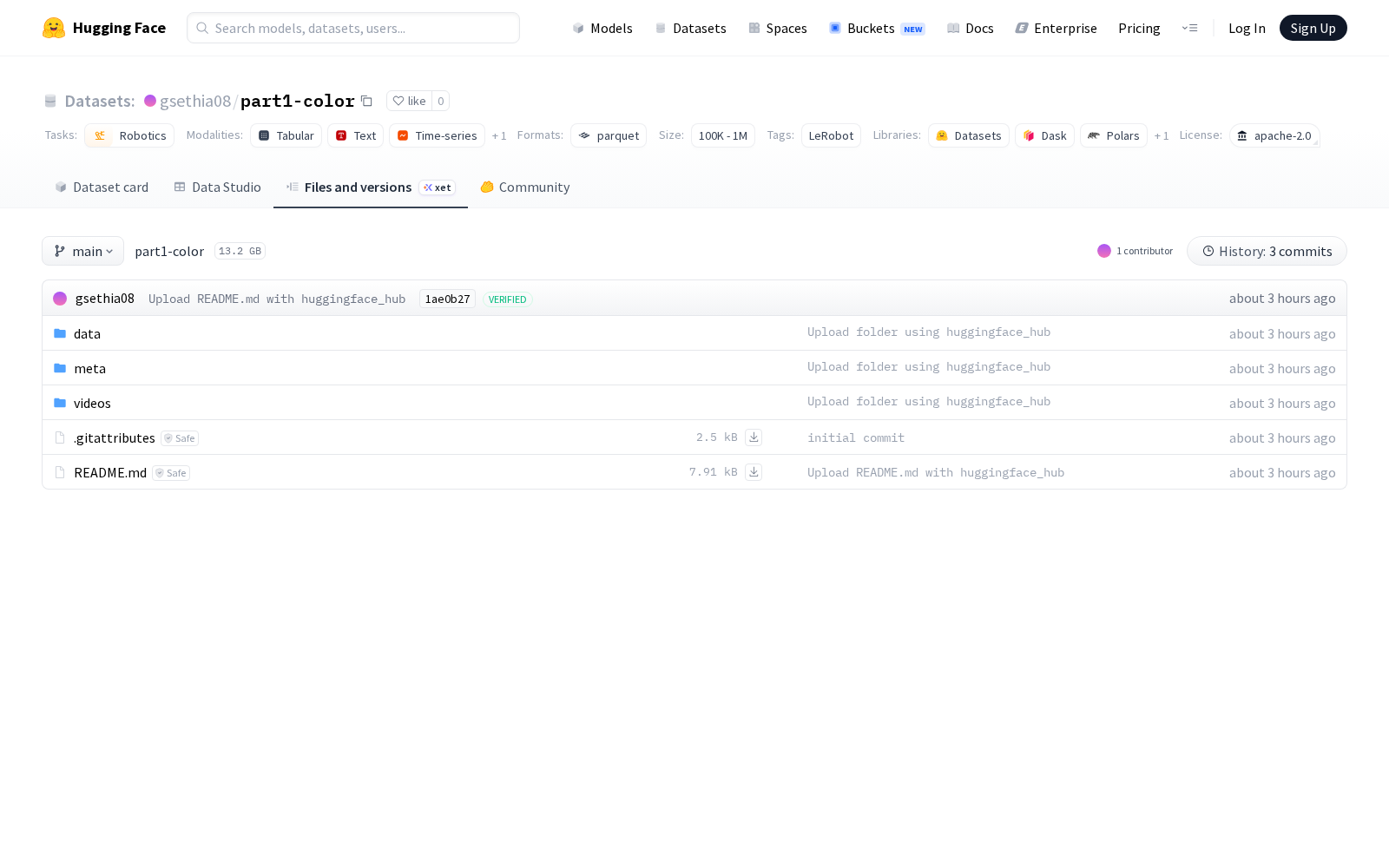
公开信息显示,part1-color数据集共包含1998个交互片段(episodes)、总帧数达824084帧,覆盖2类核心机器人任务场景。数据集结构化内容采用parquet格式存储以提升批量读取效率,配套视觉内容采用mp4格式封装,视频分辨率为1080×1920、帧率达30fps,高清高帧率的视觉素材可满足高精度视觉特征提取、细粒度动作识别等研发需求。
该数据集的核心优势在于多维度特征的完整覆盖:除了基础视觉内容外,还同步提供观察状态(含左右手腕、手指的坐标与旋转参数)、相机内外参数、动作指令、自然语言引导指令等多维度标注信息。其中本体状态数据可直接用于机器人操作策略的端到端训练,减少研发团队的标注成本;相机参数可支撑三维位姿估计、环境重建等算法研发,降低视觉导航算法的适配难度;语言指令字段则为大模型驱动的多模态人机交互研发提供了数据基础,可支撑“自然语言指令-机器人动作”的端到端模型训练。
从应用方向来看,part1-color数据集可广泛覆盖两大机器人核心研发场景:在机器人操作学习领域,可支撑工业机械臂的分拣、装配、柔性抓取,以及服务机器人的家居物品操作、人机协作等任务的算法训练;在视觉导航领域,可用于室内巡检机器人路径规划、动态避障,人形机器人复杂环境通行、自主探索等方向的算法迭代。
值得注意的是,该数据集目前暂未提供官方主页与配套论文,但采用了对商业应用友好的apache-2.0许可证,开发者可自由修改、二次分发甚至用于商用产品研发,无需强制公开修改后的代码,大幅降低了科研机构、创业公司、头部厂商等不同主体的复用门槛。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)