

当前人形机器人、服务机器人商业化进程加速,手部精细操作能力、自然语言交互能力是决定机器人落地场景广度的核心指标,但长期以来,针对柔性物体操作的多模态标注训练数据供给不足,成为制约相关技术迭代的重要瓶颈。近日,开发者gsethia08正式发布的part1-crumple_flatten_paper数据集,正是瞄准这一细分研发需求推出的垂直场景专用数据集。该数据集适配LeRobot技术框架——作为HuggingFace推出的机器人学习开源生态,LeRobot一直是全球机器人研发人员共享模型、数据集、工具链的核心载体,本次发布的数据集可直接接入该生态的相关训练工具,大幅降低研发团队的数据适配成本。
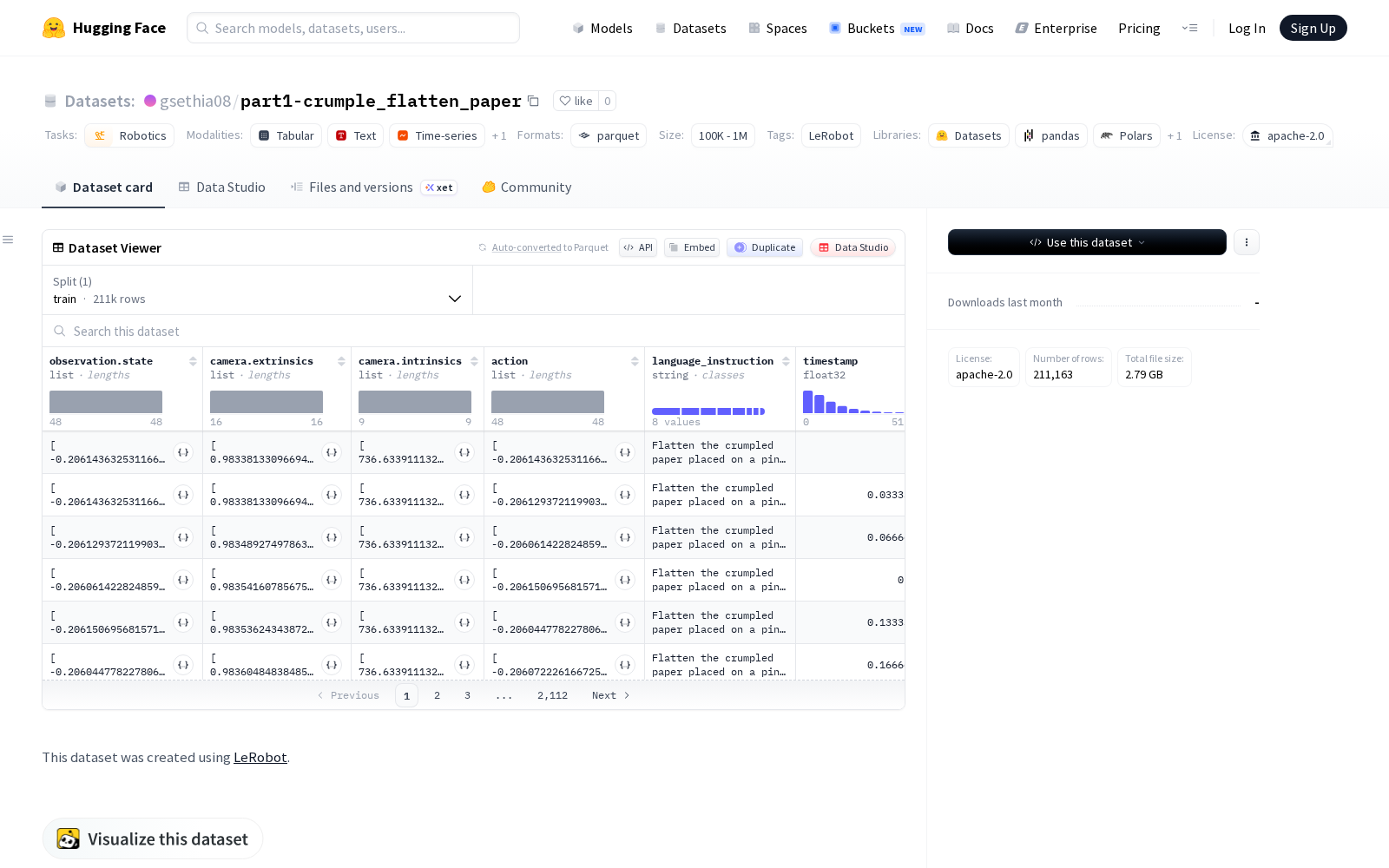
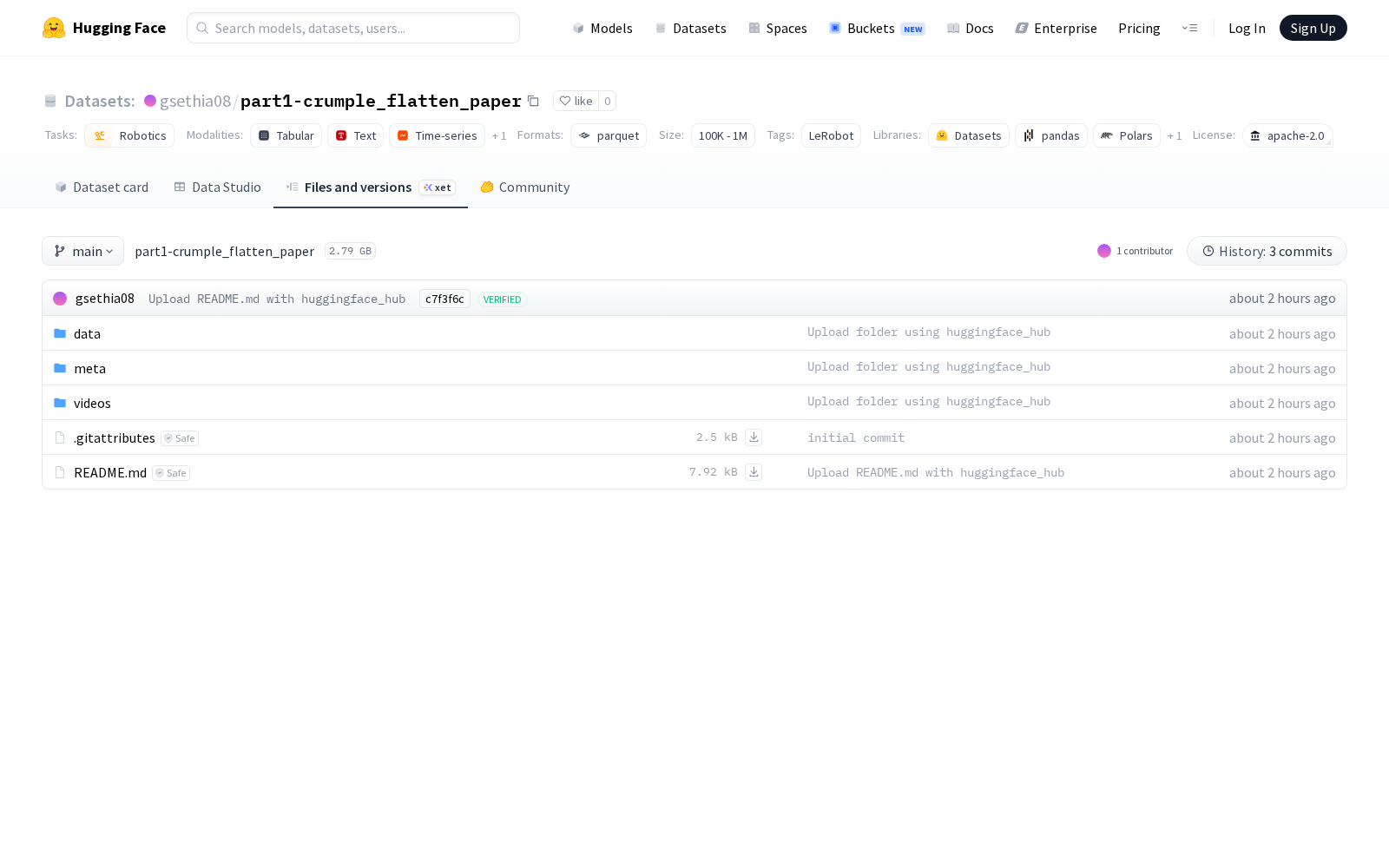
从公开的数据集信息来看,part1-crumple_flatten_paper覆盖机器人任务全流程的多维度训练特征,具体包含四大类核心数据:一是相机观察数据,覆盖不同角度、光照条件下的柔物操作视觉采集内容,支撑计算机视觉模型的动作识别训练;二是状态观察数据,记录操作过程中机器人本体的关节参数、力矩变化等核心状态值,可用于机器人控制模型的反馈训练;三是动作序列数据,对应操作全程的执行器指令序列,可直接复现标准化操作流程;四是语言指令数据,匹配了对应操作任务的自然语言描述,支撑视觉-动作-语言的多模态联合训练需求。此外,数据集的元数据也明确标注了片段数量、帧数、任务数量、数据文件及视频文件的技术参数,方便研发人员根据自身训练需求快速筛选调用。
作为聚焦柔物操作场景的专用数据集,part1-crumple_flatten_paper的典型应用方向覆盖多个机器人赛道:在服务机器人领域,可用于训练机器人完成纸张整理、衣物折叠、柔性包装拆解等日常家居、办公场景的操作任务;在工业机器人领域,可为柔性电路板装配、特殊物料包装等工业场景的精细操作训练提供数据支撑;在人机交互领域,结合语言指令特征,可推动语言引导式机器人交互技术落地,实现用户通过自然语言直接指挥机器人完成特定操作任务,大幅降低机器人的使用门槛。当前数据要素已经成为AI研发的核心生产资料,垂直场景的高质量标注数据集更是稀缺资源,本次part1-crumple_flatten_paper数据集的发布,进一步丰富了全球机器人操作领域的多模态数据集供给,为相关研发团队降低了原生数据采集、标注的成本,有望推动机器人手部精细操作、多模态交互技术的迭代提速。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)