

当前,具身智能与工业机器人产业正处于商业化落地的关键窗口期,机器人运动控制精度、多模态感知-动作协同能力是决定其作业效率、场景适配能力的核心指标,而覆盖真实作业场景的高质量标注数据集,是训练机器人控制大模型、优化核心算法的核心基础设施,也是当前行业普遍面临的供给短板。DerBoroter本次发布的数据集100_first_fold_tristan,正是针对六轴机器人研发场景打造的专用训练数据集,该数据集由LeRobot创建,主要面向机器人技术研发领域开放使用。
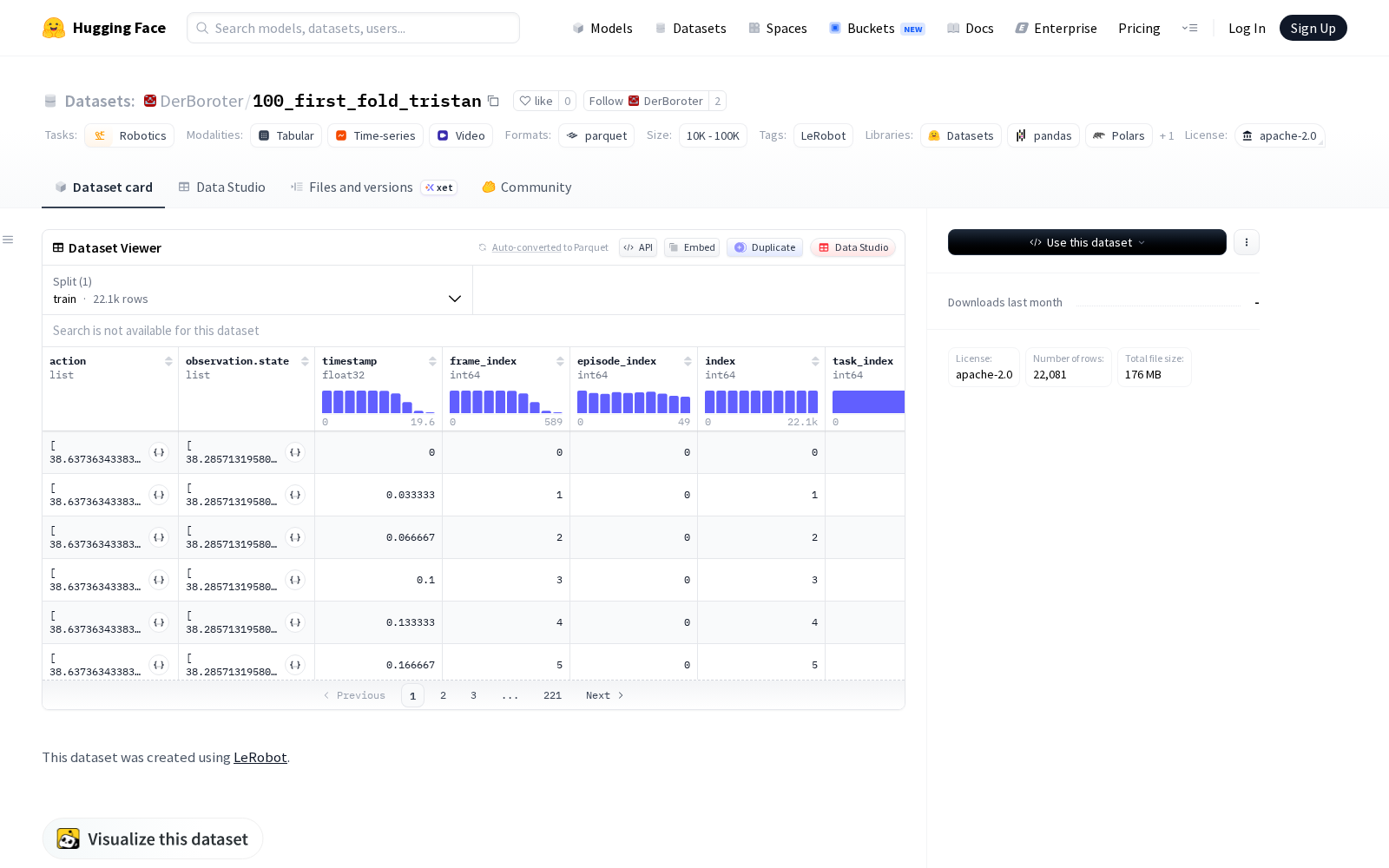
从数据构成来看,该数据集完整记录了六轴机器人执行指定任务过程中的全链路动态数据,涵盖机器人实时动作指令、全状态观测数据(包含6个核心关节的位置信息,覆盖肩部平移、肩部升降、肘部弯曲、腕部弯曲、腕部旋转和夹持器全运动节点)、前视视觉图像(分辨率640x480,采样帧率30fps)以及全链路时间戳匹配信息,确保动作数据、视觉数据、状态数据的时序完全对齐,避免多模态数据匹配误差对算法训练造成干扰。数据集共包含50个完整任务片段(episodes),累计有效数据帧达22081条,结构化数据采用parquet格式存储、视觉内容采用MP4格式存储,兼顾数据读取效率与跨框架兼容性,方便研发团队快速接入训练流程。
从应用价值来看,该数据集可广泛支撑多个机器人研发方向的技术迭代:在工业机器人运动控制领域,研发人员可基于全关节标注数据优化六轴机器人的路径规划算法,降低作业冗余动作,提升装配、搬运、分拣等典型工业场景的作业精度与运行效率;在视觉-动作协同领域,依托时序对齐的视觉数据与动作数据,可训练具身智能大模型的多模态感知决策能力,实现机器人通过视觉观测自主调整动作路径,应对非结构化场景的动态作业需求;此外,该数据集还可用于机器人数字孪生建模、核心关节故障预判算法训练等多个方向,为机器人全生命周期的技术研发提供数据支撑。本次数据集的发布,进一步丰富了全球六轴机器人领域的高质量标注数据供给,对于降低具身智能研发团队的数据采集成本、加快工业机器人核心算法迭代、推动具身智能技术商业化落地具有重要价值。
Dataset card内容:
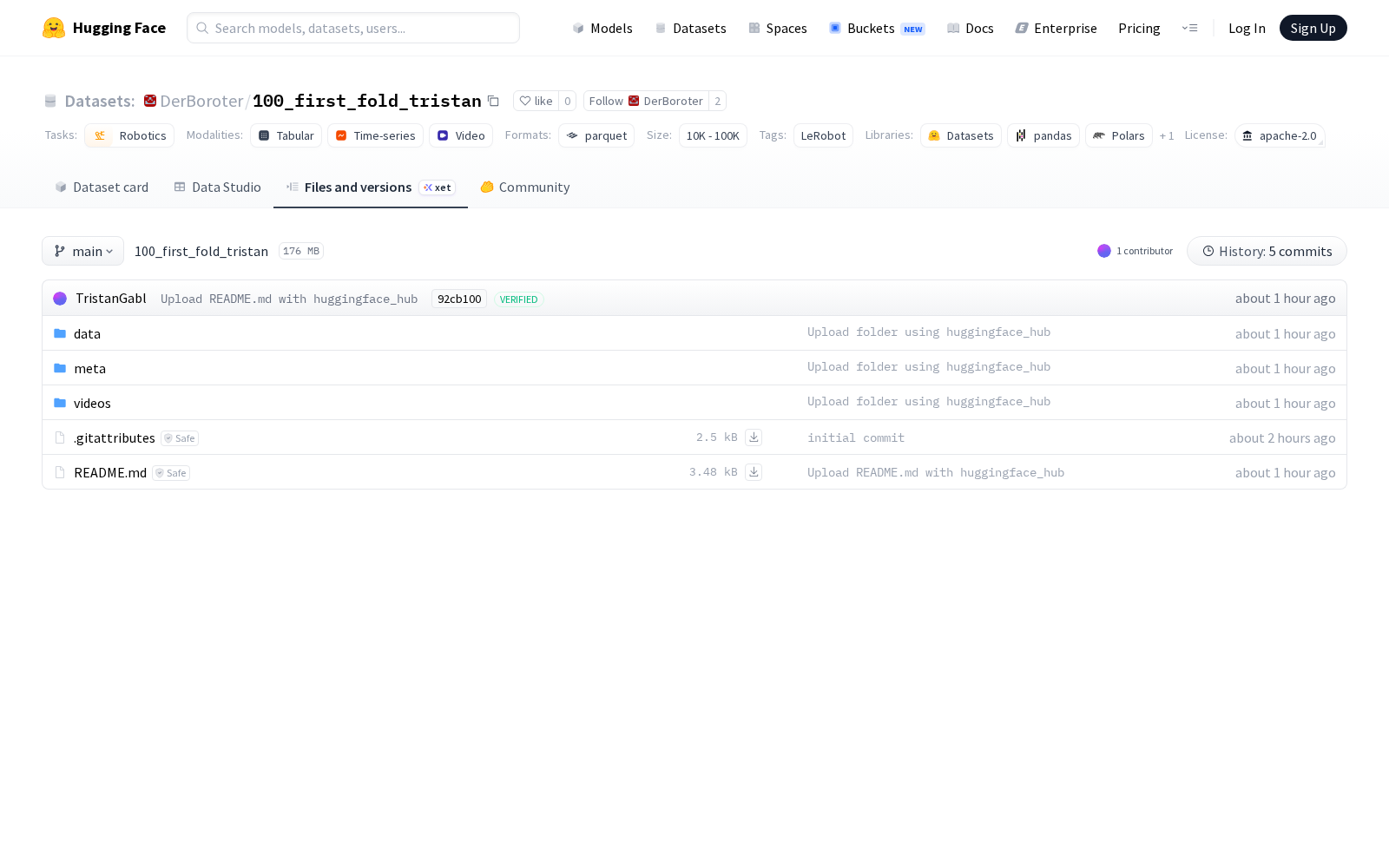
Files and versions内容:



_1769672084863.jpg)