

随着全球设施农业智能化升级进程加速,采摘机器人作为替代人工完成高重复性、高劳动强度采收作业的核心智能装备,近年来研发需求持续攀升。但由于农业场景光照波动大、果实形态与成熟度差异大、双臂协作控制复杂度高,相关研发团队普遍面临高标注、多模态场景训练数据稀缺的痛点,数据供给短板已经成为制约采摘机器人算法迭代、商业化落地的重要因素。正是瞄准这一行业共性需求,tomato-store于2026年5月7日在全球领先的AI开源社区HuggingFace正式发布eval_smolvla_bi_arm_harvest37数据集,定向支撑双臂机器人控制、农业采摘感知两大核心研发场景。
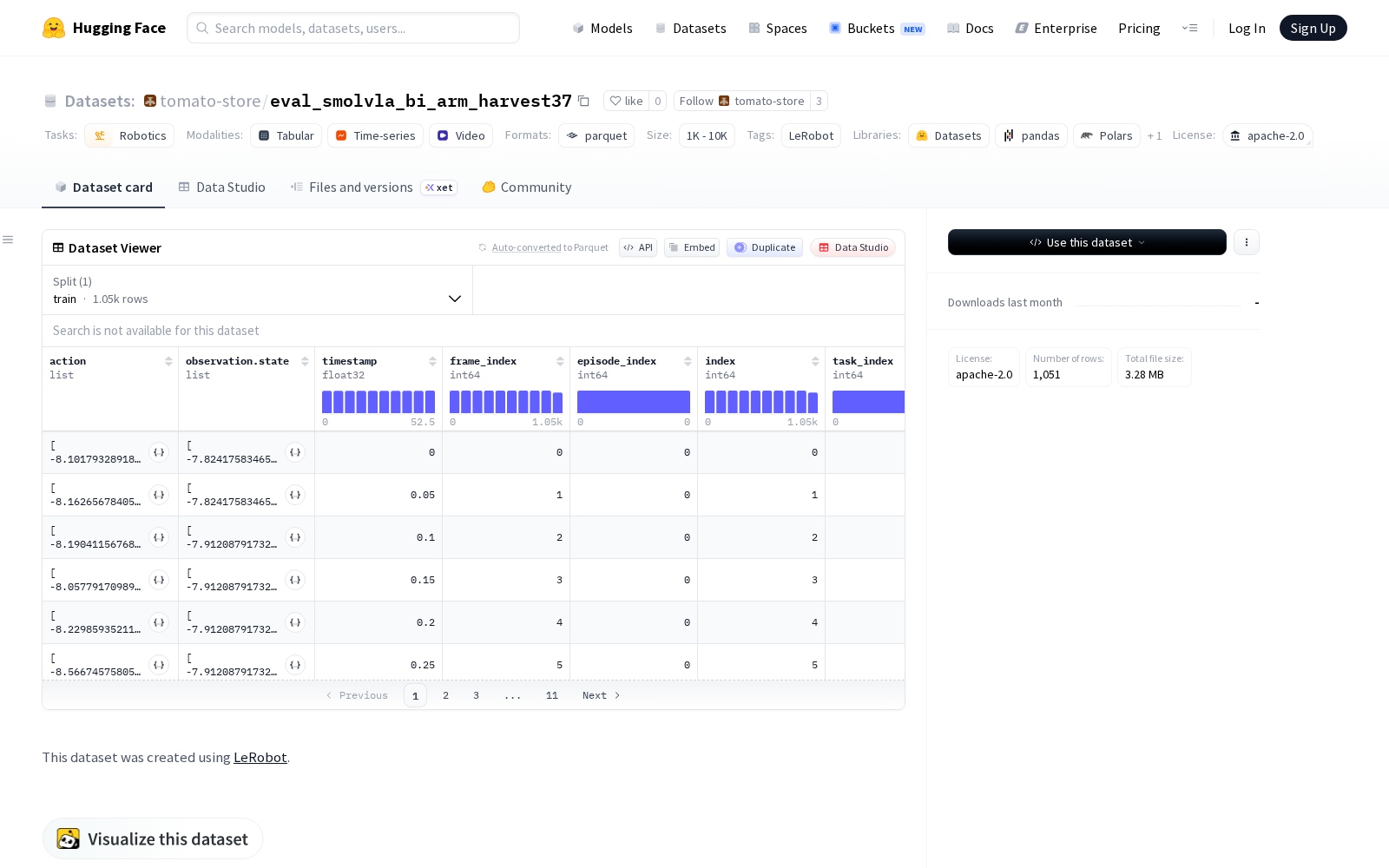
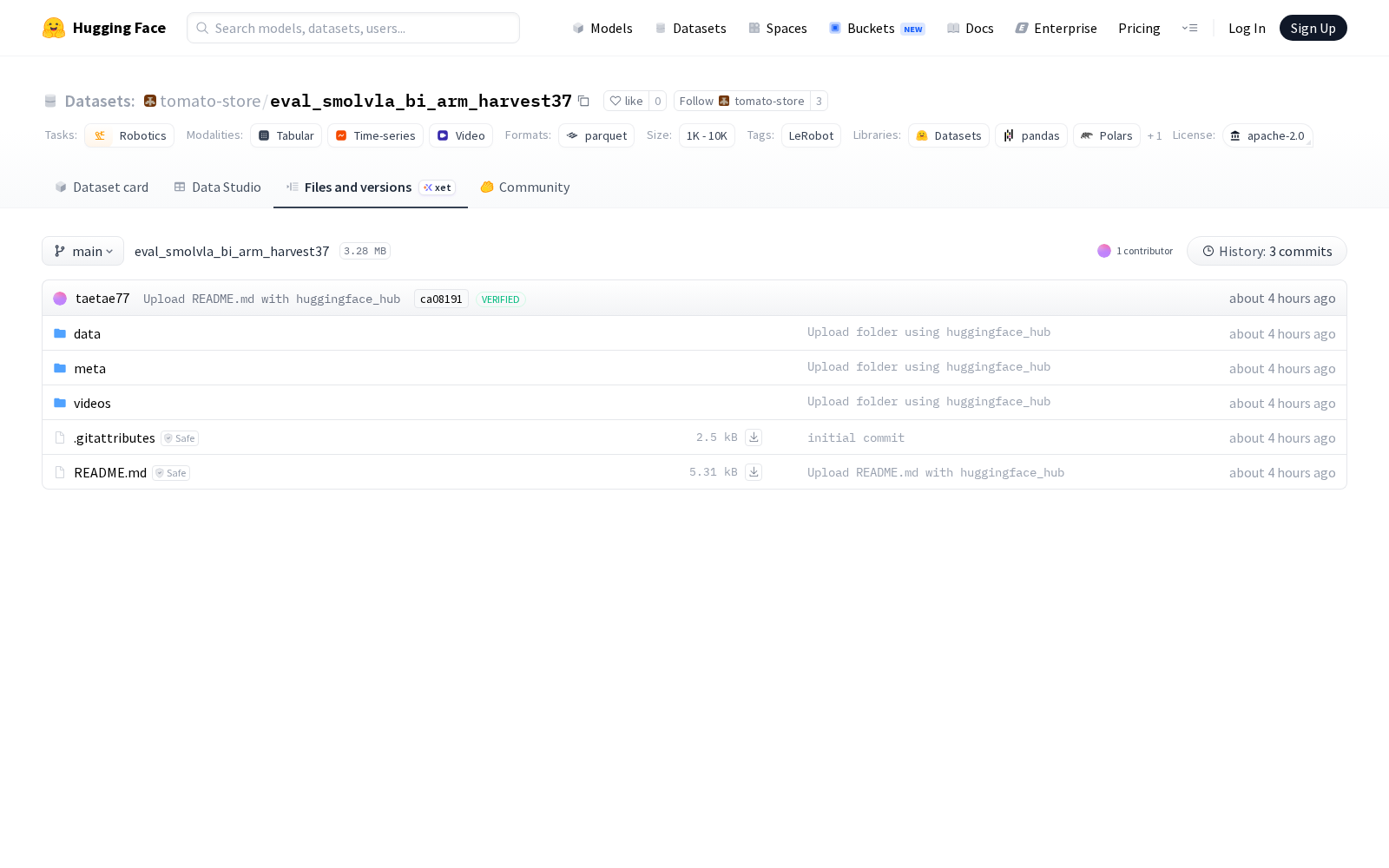
tomato-store本次发布的eval_smolvla_bi_arm_harvest37属于机器人技术领域专用训练数据集,包含动作标注、环境观察(设备运行状态数据和来自多个摄像头的场景图像数据)、时间戳、索引等核心特征字段。数据集基于LeRobot框架创建,所有字段的定义、数据类型、维度属性都在meta/info.json文件中进行了标准化说明,方便不同研发团队快速调用、适配不同的算法训练需求,大幅降低数据预处理的工作量。
从应用价值来看,该数据集可支撑三大类典型研发场景:一是双臂采摘机器人的协作控制算法训练,帮助算法模型学习双臂避障、协同抓取、果柄无损分离等核心动作逻辑,降低机器人作业过程中的果实损伤率;二是复杂农业场景的感知算法优化,基于多摄像头采集的真实场景图像数据,可支撑果实成熟度识别、采摘目标定位、障碍物检测等视觉模型的训练,提升机器人在不同光照、不同植株长势场景下的环境适配能力;三是机器人仿真到真实场景的域迁移算法研发,研发团队可基于该数据集的真实场景标注,优化仿真模型的拟合度,大幅降低真实场景测试的时间与经济成本。
在数据要素驱动数字经济与实体产业深度融合的大背景下,垂直场景专用训练数据集的开源共享,是降低AI技术落地门槛、加速垂直行业智能化升级的核心基础。本次eval_smolvla_bi_arm_harvest37数据集的发布,填补了农业采摘场景下双臂机器人多模态训练数据的供给空白,对于推动设施农业无人化装备的研发迭代、降低中小研发团队的数据集采集成本具有重要意义。
查看eval_smolvla_bi_arm_harvest37
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)