

当前,全球具身智能与工业机器人赛道正处于高速发展期,算法迭代对多模态、高标注精度的实采训练数据需求持续攀升,但面向机械臂控制、机器人感知场景的专用结构化数据集供给长期不足,尤其是同时同步采集动作指令、设备状态、多视角视觉信息的时间对齐数据集稀缺,已成为制约相关技术从实验室走向商用落地的核心瓶颈之一。
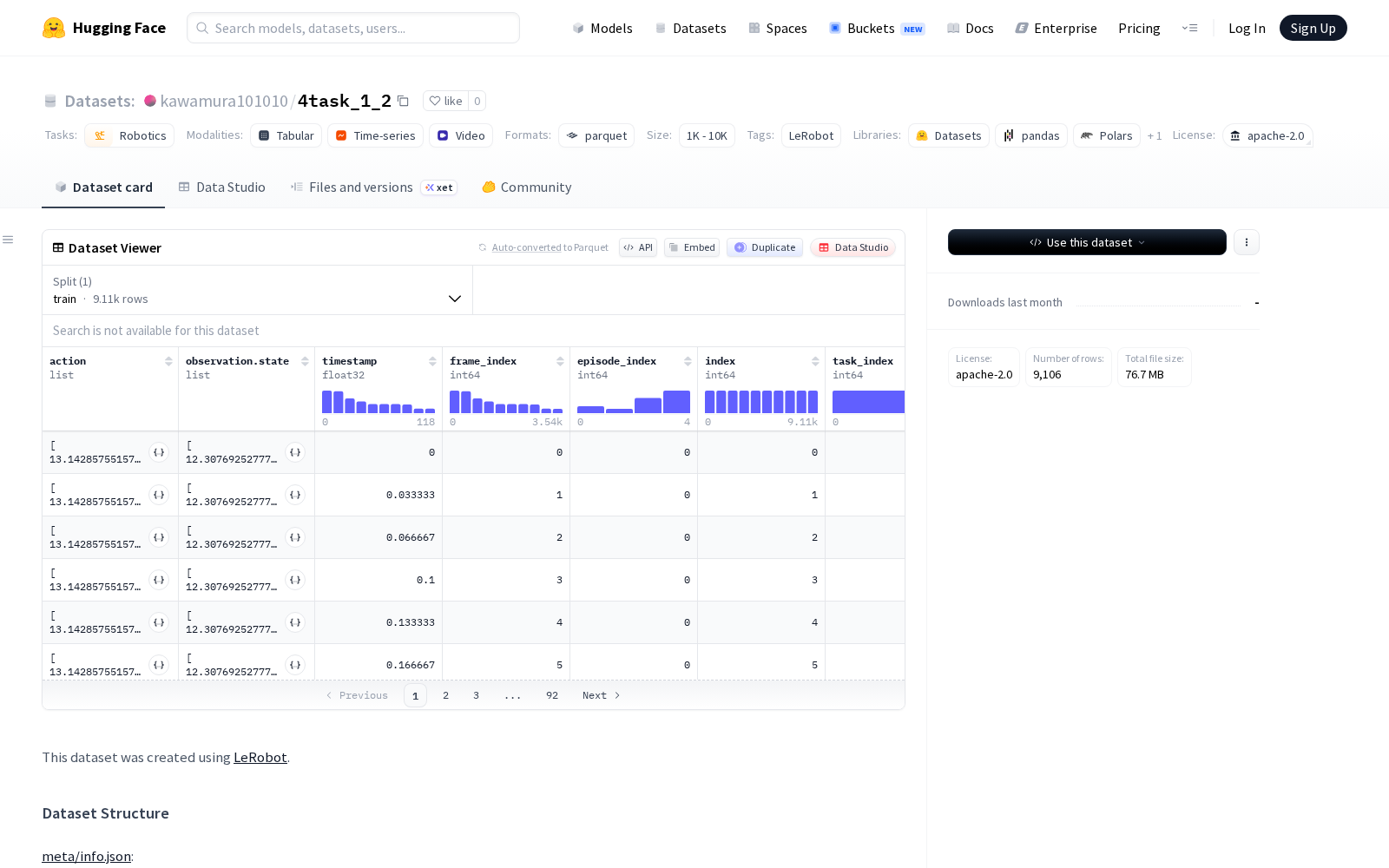
作为全球最大的AI开源模型与数据集托管平台,HuggingFace是全球AI研发人员获取训练数据的核心渠道,近日开发者kawamura101010于2026年5月7日正式在该平台首发由LeRobot创建的机器人专用数据集4task_1_2,为相关研发团队提供了高质量的训练数据选择。据公开信息显示,该数据集共包含5个episodes、9106帧有效数据,涉及1项核心任务,采用适配AI训练场景的parquet列式存储格式,兼具高压缩率、快速读取等优势,能够大幅降低大规模训练过程中的数据IO损耗,提升研发效率。
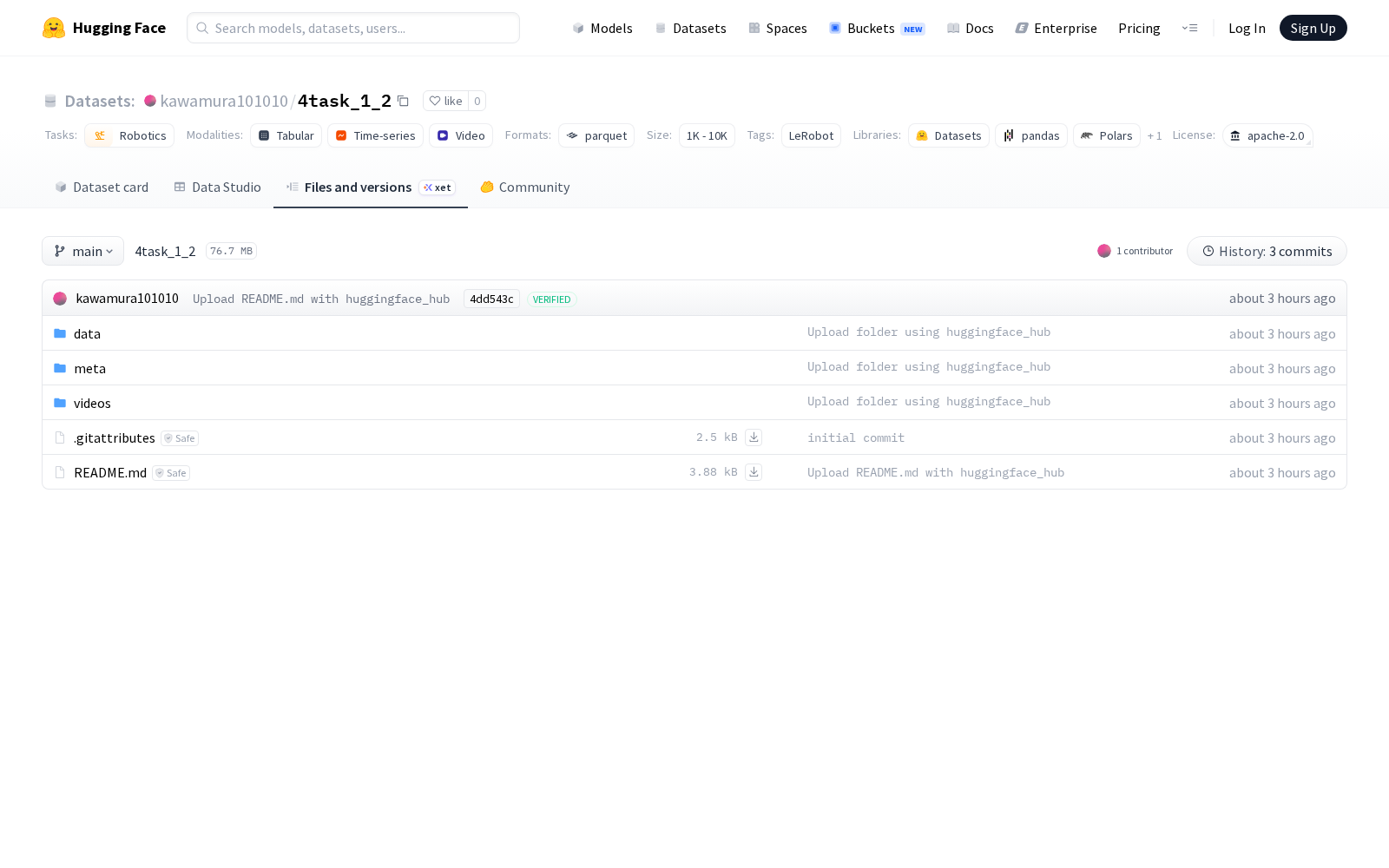
本次发布的数据集涵盖多维度特征,既包含6个自由度的机械臂位置控制动作数据(覆盖肩部平移、肩部升降、肘部弯曲、腕部弯曲、腕部旋转、夹持器位置全维度控制参数),也同步收录了6个自由度的机械臂实时状态观测数据,同时配套360x640分辨率、30fps帧率、h264编码的前视和腕部摄像头视频数据,以及时间戳、帧索引、episode索引等标准化元数据,所有数据维度实现时间轴对齐,无需研发团队额外做数据清洗与对齐工作。
从应用场景来看,该数据集可广泛应用于机械臂控制、机器人感知两大核心领域:机械臂动作与状态数据可用于工业分拣、装配等场景的轨迹规划算法训练、末端夹持精度优化、连续任务执行逻辑迭代;多视角视觉数据与动作数据结合后,可支撑机器人视觉伺服算法训练、动态环境感知模型优化、障碍物规避算法验证等研发需求,有效降低相关团队的真实场景数据采集成本,加速技术落地进程。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)