

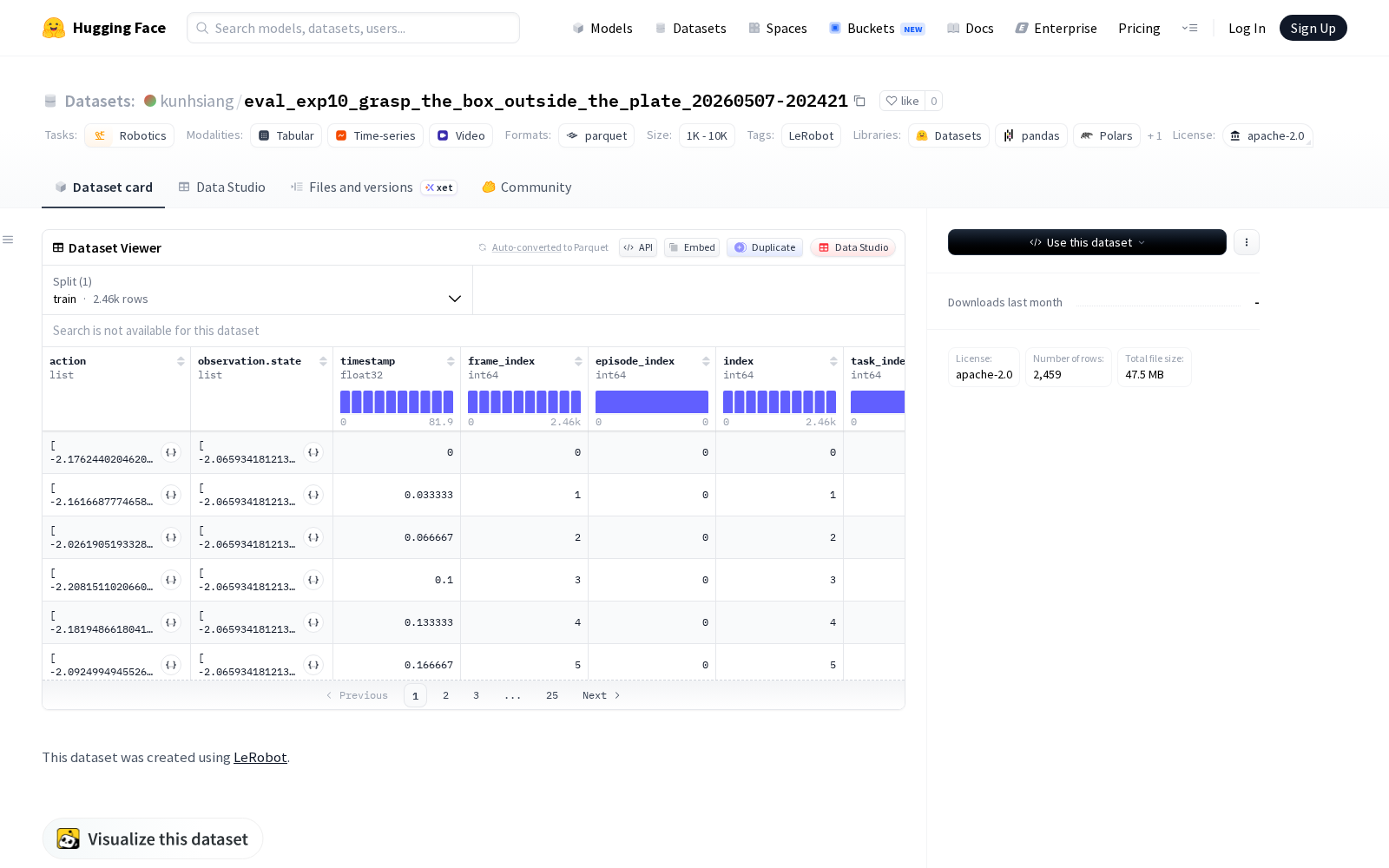
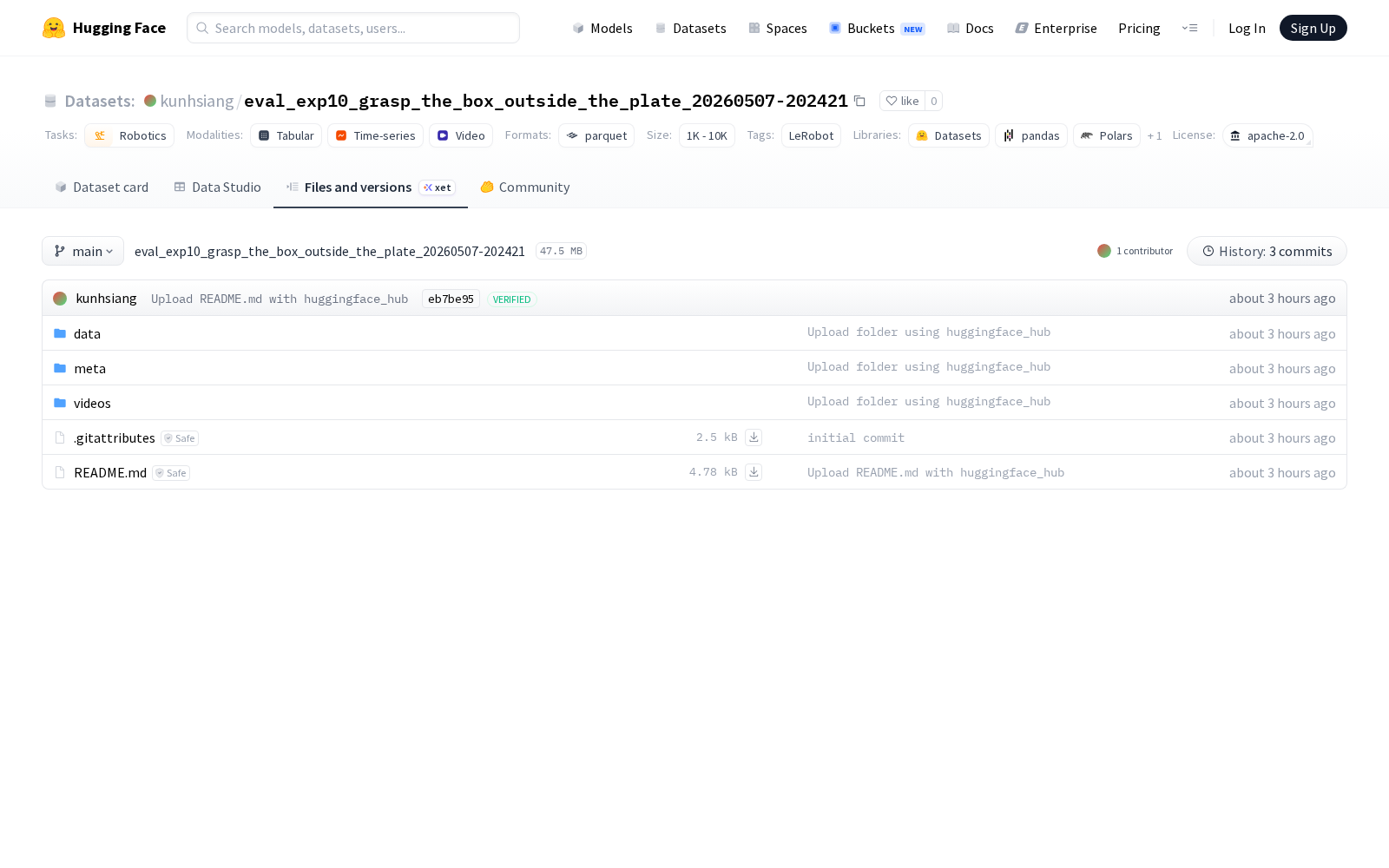
kunhsiang本次发布的数据集eval_exp10_grasp_the_box_outside_the_plate_20260507-202421,该数据集是使用LeRobot创建的,与机器人技术相关。数据集包含多种特征,如动作、观察(状态和来自不同视角的图像)、时间戳和索引。数据集结构在meta/info.json文件中详细描述,包括数据类型、形状和其他元数据。然而,README文件未明确提供数据集的目的或内容描述,仅涉及结构和特征。
查看eval_exp10_grasp_the_box_outside_the_plate_20260507-202421
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)