

当前具身智能与工业机器人产业正进入快速落地期,面向真实作业场景的高质量多模态训练数据,已成为制约机器人视觉引导、精密操作类算法迭代的核心瓶颈。相较于成本高、周期长的自研数据采集,公开的标准化数据集可大幅降低研发团队的准入门槛,是推动具身智能技术普惠的核心公共资源。
本次radoolonto推出的angle_peg_05_05_cam_ref_cam0_1数据集于2026年5月7日首发于全球最大的AI模型与数据集社区HuggingFace,核心面向机器人视觉引导、高精度操作任务领域的研发需求,也是当前少有的针对精密插装类操作场景的标准化机器人数据集。
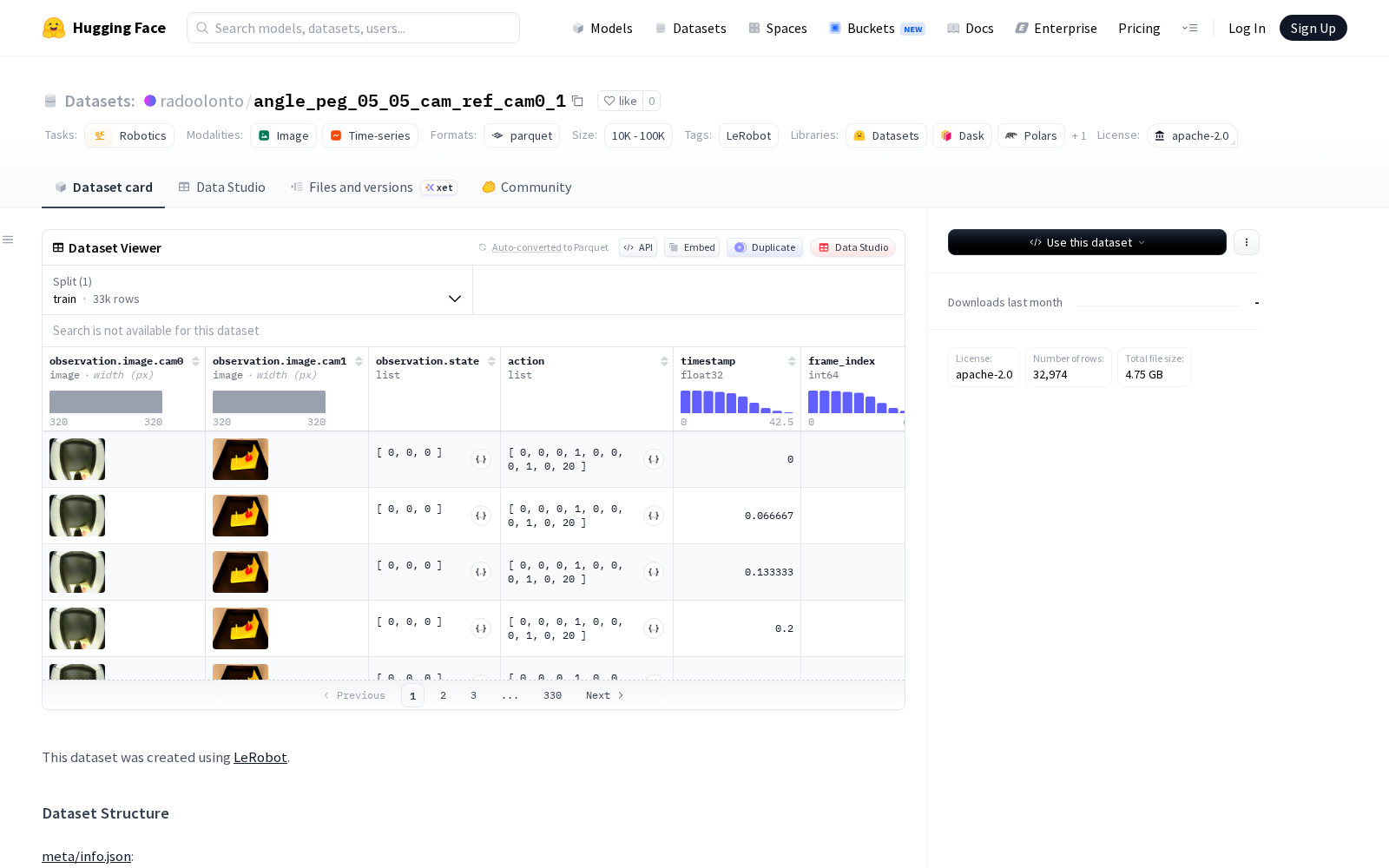
该数据集由LeRobot创建,覆盖Franka协作机器人作业全链路的多模态数据,共包含81个完整作业episodes,总计32974帧有效数据,仅对应1类核心操作任务,数据标注的一致性与场景针对性更强。具体数据维度包括来自cam0、cam1两个机位的实时视觉图像、3维浮点数格式的机器人状态观测值、10维浮点数格式的动作指令数据,同时配套了时间戳、帧索引、episode索引等关联标注,可直接满足多模态模型训练的跨维度数据对齐需求。数据主体以parquet格式存储,配套视频文件采用mp4格式,其中数据文件大小为100MB,视频文件大小为200MB,采样帧率为15fps,所有数据均划定为训练集。
从应用价值来看,该数据集针对性覆盖Franka机器人的精密操作场景,可广泛用于多个研发方向:典型应用包括工业机器人视觉引导对位算法训练,尤其是3C电子、半导体制造领域的微小部件插装、精密装配场景的模型开发;也可用于力觉-视觉融合的操作策略优化,提升机器人在非结构化环境下的作业成功率;同时还可支撑数字孪生环境下的机器人作业仿真训练、小样本操作任务迁移算法研发等多个方向,为具身智能算法的落地提供高质量数据底座。
该数据集的发布也进一步丰富了国内公开机器人操作数据集的供给结构,为数据要素在具身智能领域的流通应用提供了新的实践样本,也将助力中小研发团队降低数据采集成本,加快精密操作类机器人技术的落地进程。
查看angle_peg_05_05_cam_ref_cam0_1
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)