

当前,全球移动机器人产业正处于规模化落地的关键阶段,无论是消费级陪伴机器人、商用配送机器人,还是工业场景的巡检作业机器人,其核心竞争力均聚焦于跟随控制精度、视觉导航稳定性两大核心能力,而这两类算法的训练迭代高度依赖真实场景下采集的多模态标注数据。长期以来,行业内公开的、适配特定机器人型号的专用数据集供给相对稀缺,成为制约中小团队算法研发效率的核心瓶颈之一。
近日,技术主体jjr1007正式发布由LeRobot创建的record-merve-4_20260507_155612数据集,该数据集于2026年5月7日首发于全球知名AI开源社区HuggingFace,主要面向机器人技术研发场景开放使用。据公开信息显示,该数据集结构覆盖多维度核心特征:包含机器人6个关节位置的动作数据、6个关节位置的观察状态数据,分辨率为1080*1920、帧率30fps的前端摄像头第一视角图像,以及对应时间戳、帧索引、episode索引等关联标注字段。全数据集共包含15个episodes、13293帧有效数据,总数据文件大小为100MB,配套视频文件大小为200MB,适配机器人型号为so_follower,采用Apache 2.0开源许可证,允许使用者自由修改、分发乃至商用。
从应用场景来看,该数据集可广泛应用于两大核心研发方向:其一为机器人跟随控制领域,研发人员可基于数据集中的关节动作与状态反馈对应关系,训练跟随机器人的动态姿态调整算法,优化不同行进速度、复杂障碍物场景下的跟随稳定性,降低跟随脱靶、姿态抖动等问题的发生概率;其二为视觉导航领域,搭配同步采集的第一视角高清画面与姿态标注数据,研发团队可开展端到端视觉导航模型训练,验证基于视觉输入的路径规划、动态避障算法的落地效果,大幅减少真实环境测试的时间与成本投入。
本次数据集的开源发布,进一步丰富了国内机器人领域的开源数据供给体系,为跟随机器人相关算法的研发、基准测试提供了标准化的数据源参考,也为后续更多细分场景机器人专用数据集的开放共享提供了可借鉴的范式,有助于推动整个移动机器人产业的技术迭代效率提升。
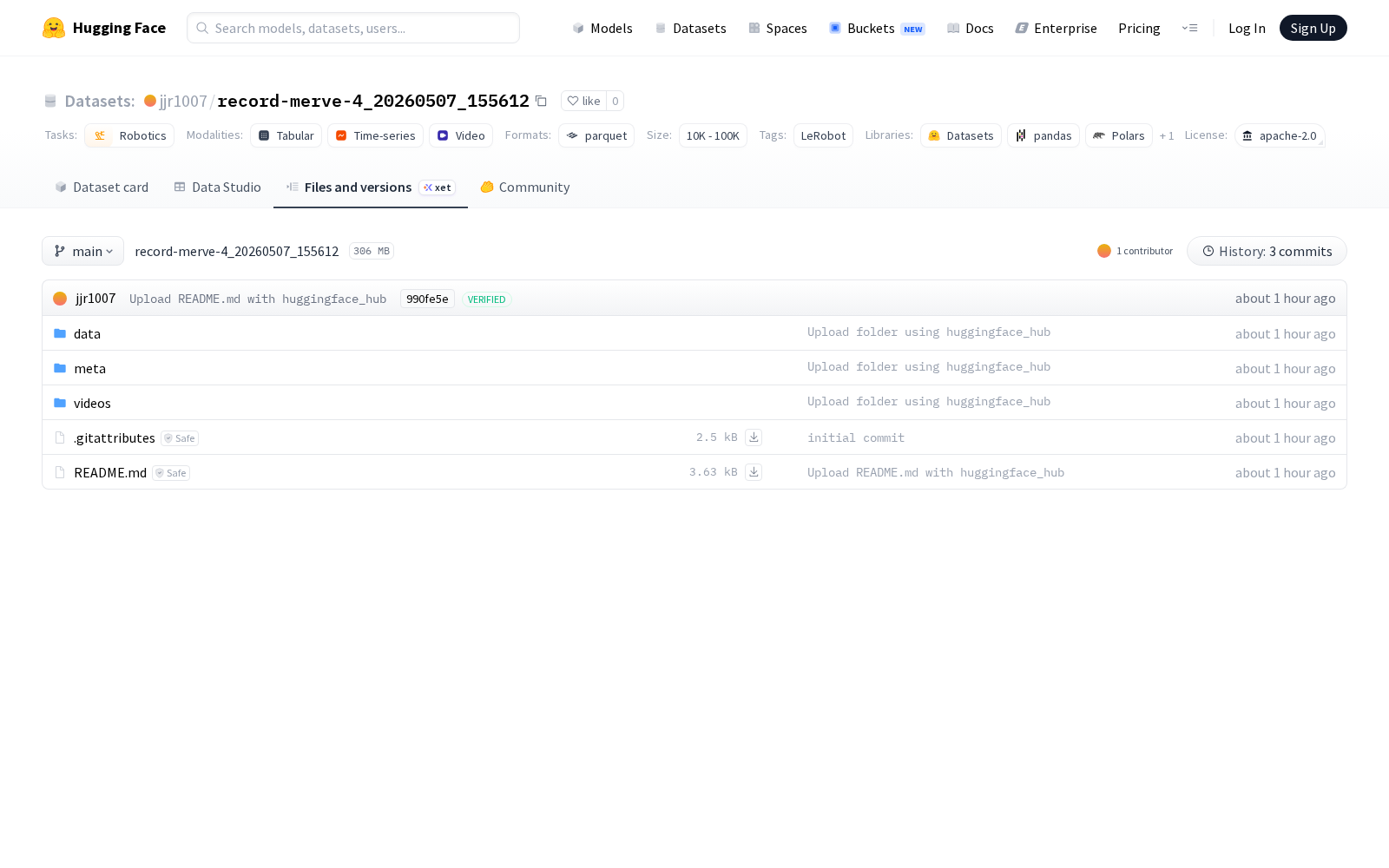
查看record-merve-4_20260507_155612
Dataset card内容:
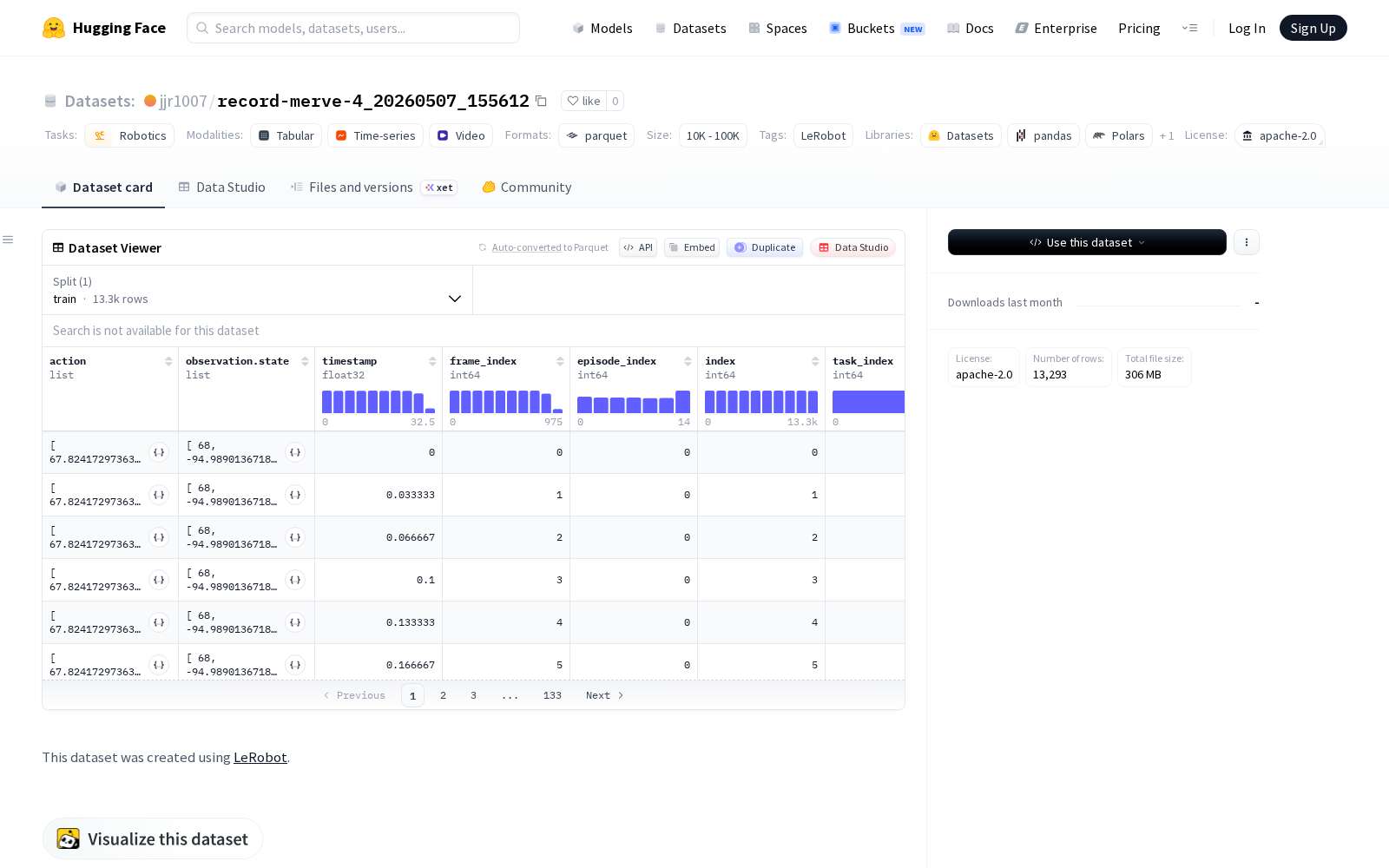
Files and versions内容:



_1769672084863.jpg)