

当前具身智能与通用机器人产业进入快速落地期,高质量多模态对齐训练数据是制约算法迭代效率的核心瓶颈之一,具备动作-视觉同步标注、场景覆盖完整的公开数据集,已成为行业重要的公共研发资源。
近日,开发者saipuneethgottam正式发布sweep_dataset_merged_normalized_clean80_from_sources数据集,该数据集于2026年5月7日首发于HuggingFace平台,聚焦机器人控制与多摄像头视觉感知两大应用方向。
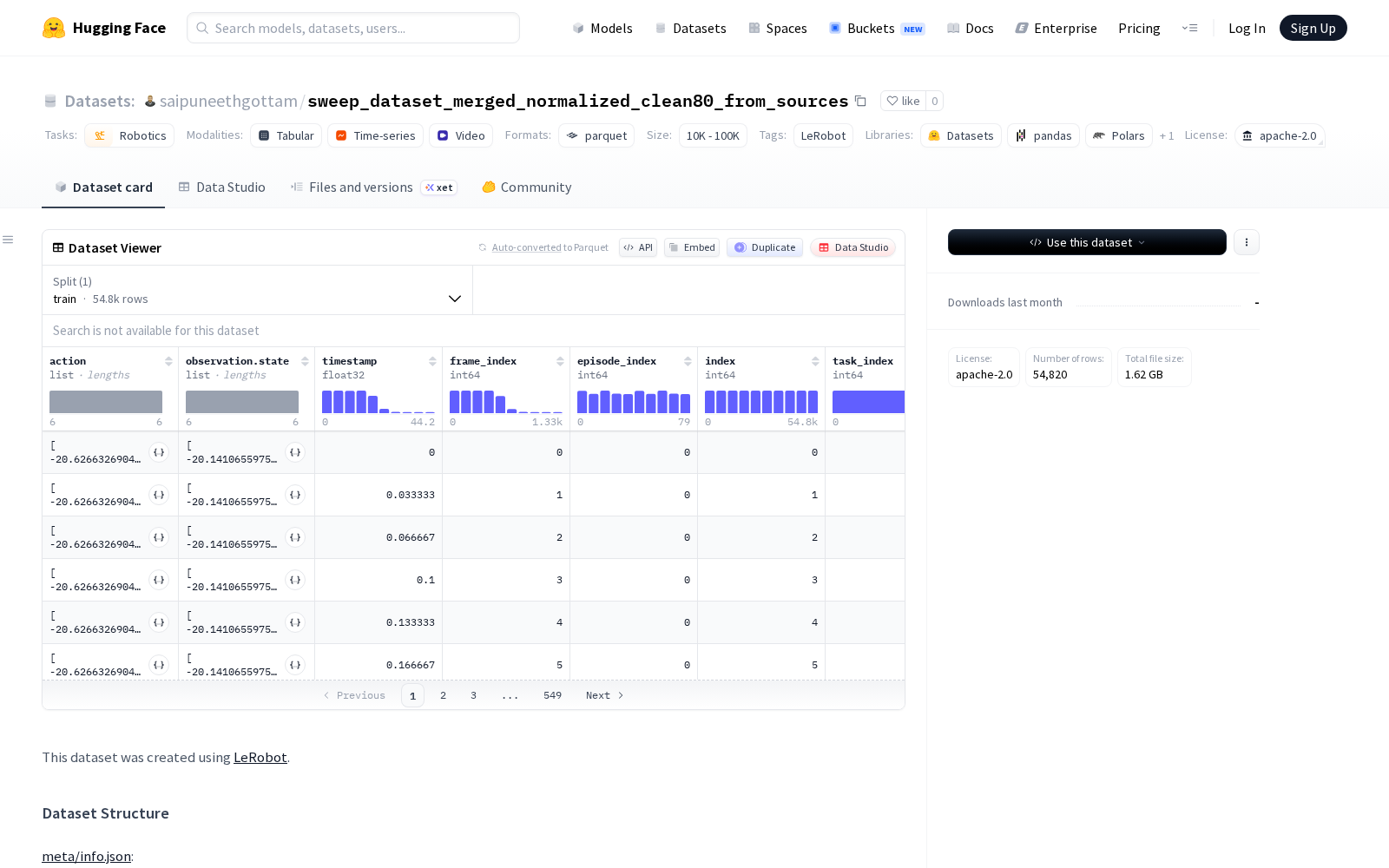
据公开信息显示,该数据集基于HuggingFace开源机器人学习框架LeRobot创建,采用适合大规模数据处理的parquet格式存储,共包含80组完整任务序列(episodes)与54820帧有效标注数据。数据集内容覆盖机器人动作与环境观察两大核心维度:动作层包含机器人关节位置等运动参数,观察层同步采集了前置、左侧、手腕三个视角的摄像头图像数据,同时配套标注了时间戳、帧索引、任务序列索引、任务类型索引等元信息,可直接用于算法训练的对齐调用。此外,该数据集采用Apache 2.0开源许可证,支持开发者免费商用、修改与二次分发,大幅降低了中小研发团队的使用门槛。
从应用价值来看,该数据集可广泛应用于多个机器人研发场景:在机器人控制领域,动作参数与视觉信息的配对标注,可支撑机械臂轨迹规划、示教学习、力位混合控制等算法的训练与验证;在多摄像头视觉感知领域,多视角同步的图像数据,可用于多视角三维重建、环境语义分割、动态障碍物识别、手眼标定等技术的研发迭代,也可延伸至家用服务机器人清扫、工业机械臂分拣装配等具身智能任务的预训练环节。
查看sweep_dataset_merged_normalized_clean80_from_sources
Dataset card内容:
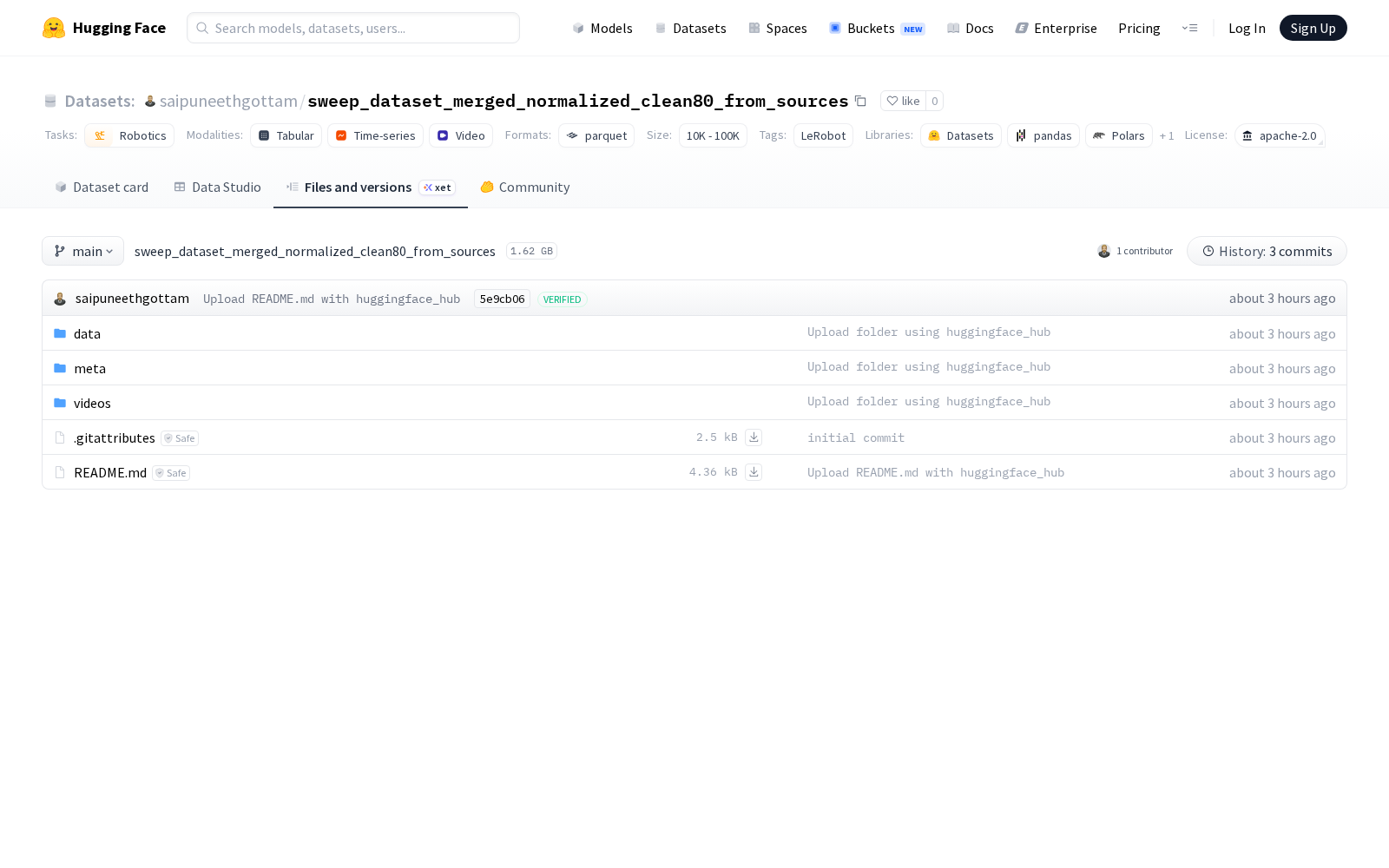
Files and versions内容:
行业分析指出,当前全球公开机器人数据集普遍存在模态单一、标注不规范、开源许可限制多等问题,该数据集的发布进一步丰富了轻量级机器人操作任务的训练数据供给,其标准化的数据结构与友好的开源协议,对推动具身智能技术的普惠研发、降低机器人算法落地成本具有积极意义。



_1769672084863.jpg)