

当下具身智能产业进入快速落地期,机器人操作学习作为支撑工业机器人、服务机器人完成复杂场景任务的核心技术,对真实场景下的多模态训练数据存在旺盛需求。相较于通用AI数据集,垂直于机器人拾取放置场景的数据集需要同时覆盖机器人本体运动状态、多视角视觉感知、时序动作关联等多维度信息,采集成本高、技术门槛高,优质公开数据集的供给始终是行业的普遍诉求。
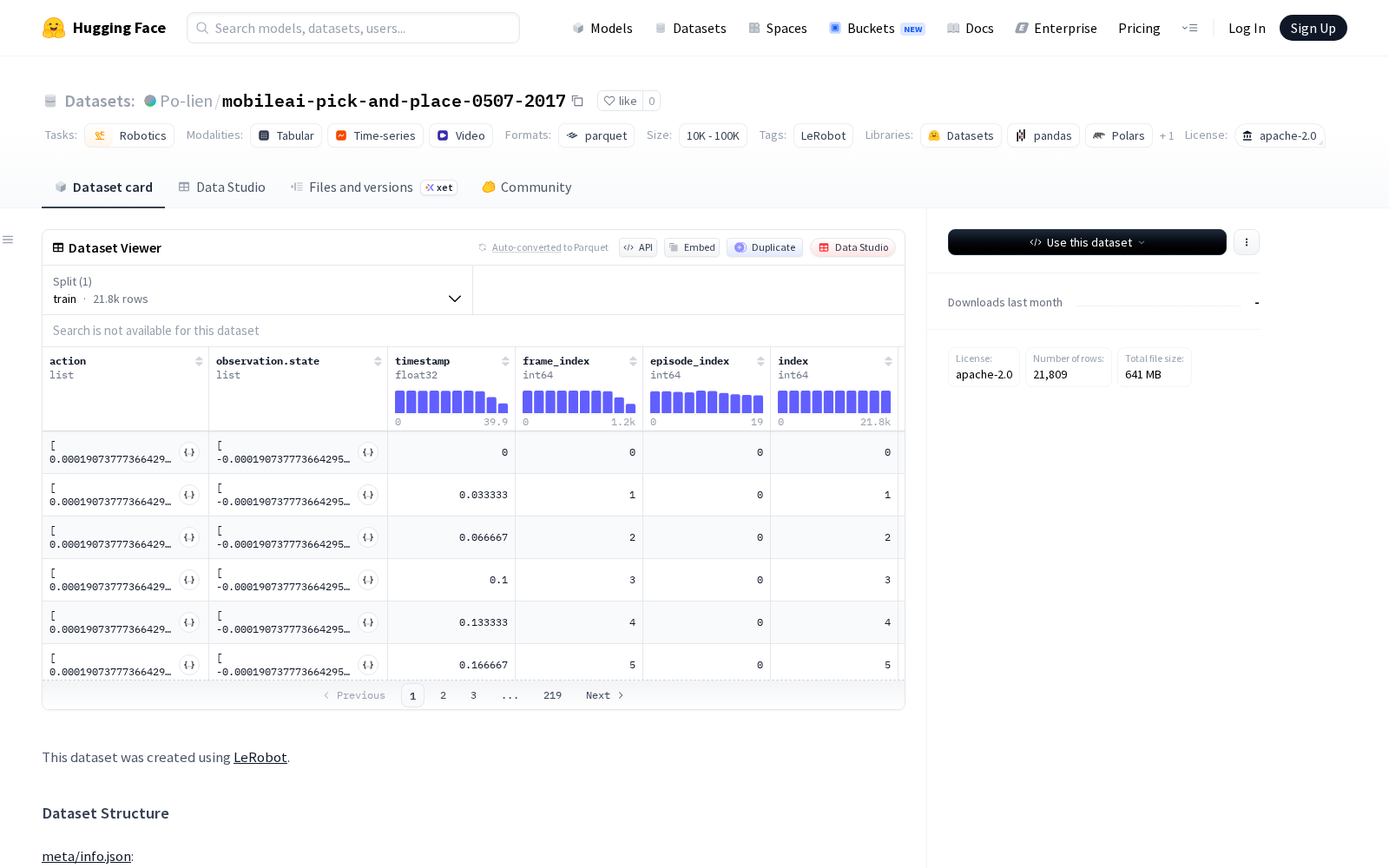
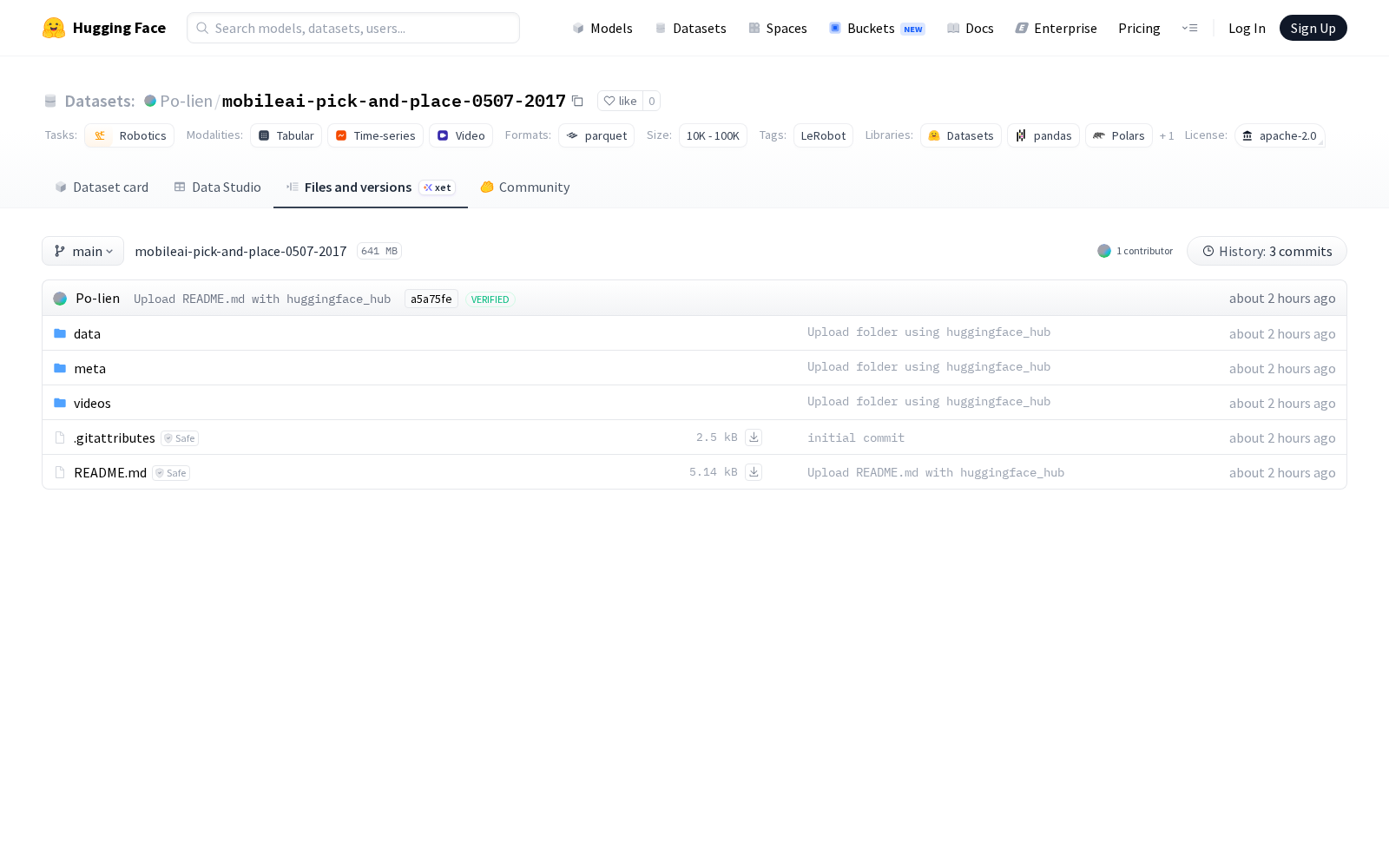
本次Po-lien发布的mobileai-pick-and-place-0507-2017数据集,正是针对机器人拾取放置场景打造的专用多模态训练数据集,全量基于LeRobot框架构建,包含20个采集序列(episodes)和21809帧有效标注数据,可充分满足小规模算法训练、效果验证等研发需求。
具体来看,数据集覆盖四大类核心数据维度:一是机器人动作数据,包含16个关节的实时位置与速度信息;二是机器人观察状态数据,同步收录16个关节的位置与速度反馈数据;三是多视角视觉数据,搭载三个摄像头同步采集的480x640分辨率、30fps视频流,可支撑多视角视觉感知算法的训练;四是时序元数据,配套完整的时间戳、帧索引等标注信息,可满足时序动作学习类算法的训练要求。存储层面,结构化数据采用parquet格式存储,容量为100MB,配套视频数据总容量为500MB,轻量化的存储设计也降低了开发者的下载与使用门槛。
从应用价值来看,该数据集可广泛适用于多个机器人研发场景:可用于拾取放置类操作算法的训练与效果验证,优化机器人对不同形态、摆放角度物体的抓取成功率;可作为Sim2Real(仿真到真实环境迁移)算法的验证基准,帮助研发团队缩小仿真训练与真实场景落地的效果差距;还可为工业场景小物件分拣、仓储物流货品码放、家庭服务机器人物品整理等场景的算法研发提供预训练数据支撑。
查看mobileai-pick-and-place-0507-2017
Dataset card内容:
Files and versions内容:
作为垂直领域的公开训练数据集,本次发布的数据集进一步丰富了具身智能领域的公共数据供给,对于降低中小研发团队的训练数据获取成本、加速机器人操作学习技术的落地迭代、推动数据要素在AI产业的价值释放均有积极意义。



_1769672084863.jpg)