

近年来,随着工业自动化升级、人形机器人赛道持续爆发,机械臂控制、视觉引导操作相关技术的研发需求快速增长,而兼具多视角视觉数据与完整运动学参数标注的高质量训练数据集,始终是制约相关算法落地效率的核心瓶颈之一。作为机器人领域数据要素供给的新进展,L7-Robotics本次发布的数据集so101_3cam_tasks_v2,正是面向这一行业痛点打造的专用训练数据源。
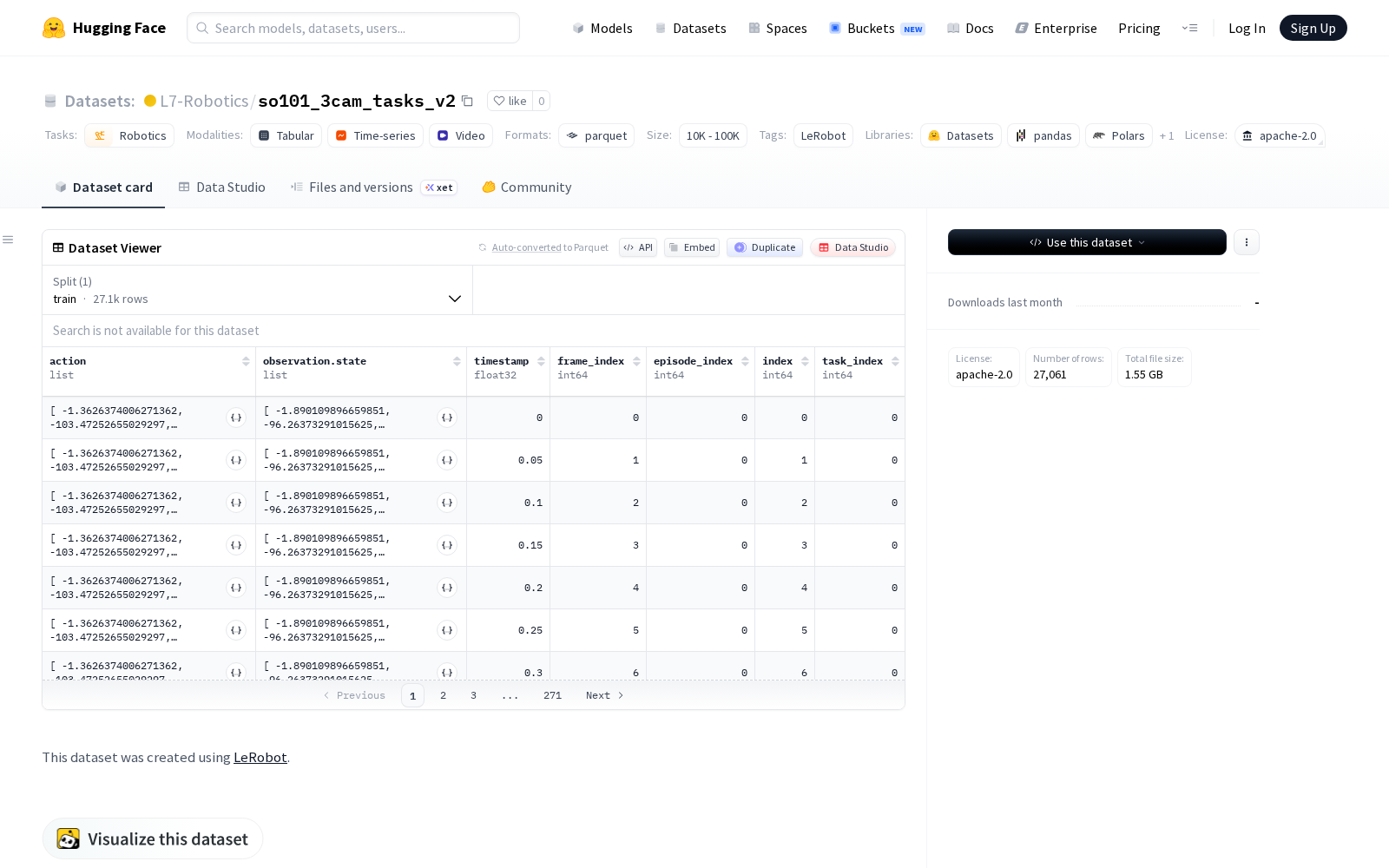
该数据集是使用LeRobot创建的,主要面向机器人技术研发场景开放。官方披露参数显示,数据集包含60个完整操作剧集、27061帧标注数据,覆盖2类典型机械臂操作任务,结构化数据文件大小为100MB,配套视频文件大小为200MB,采集帧率为20fps,可满足多数中小规模算法模型的训练、微调需求。
从数据标注维度来看,该数据集覆盖多模态特征:动作、观察状态的数据类型为float32,形状为6,分别对应肩部平移、肩部提升、肘部弯曲、手腕弯曲、手腕滚动和夹持器的位置,完整记录机械臂全链路运动参数;图像观察的数据类型为视频,包含顶部、后部、手腕三个机位的同步采集内容,形状为480x640x3,分别对应高度、宽度和RGB通道数,可还原操作场景的全域视觉信息;此外还配套时间戳、帧索引、剧集索引、索引和任务索引字段,数据类型分别为float32和int64,形状为1,方便研发者按需截取对应场景的训练数据。
从应用价值来看,该数据集可支撑多个机器人研发方向的技术落地:在工业制造场景,可用于3C电子组装、零部件分拣等场景的机械臂视觉抓取算法训练,提升复杂工况下的操作精度与稳定性;在协作机器人场景,可用于人机共线场景下的动态视觉引导算法开发,降低机械臂对固定工装的依赖;在人形机器人研发领域,可作为上肢操作技能的训练数据源,加速人形机器人通用操作能力的迭代。本次数据集的发布,进一步丰富了国内机器人训练数据的供给池,对于降低机器人研发团队的初级数据采集成本、缩短算法迭代周期具有重要价值,也为数据要素在先进制造业、机器人赛道的落地应用提供了参考样本。
Dataset card内容:
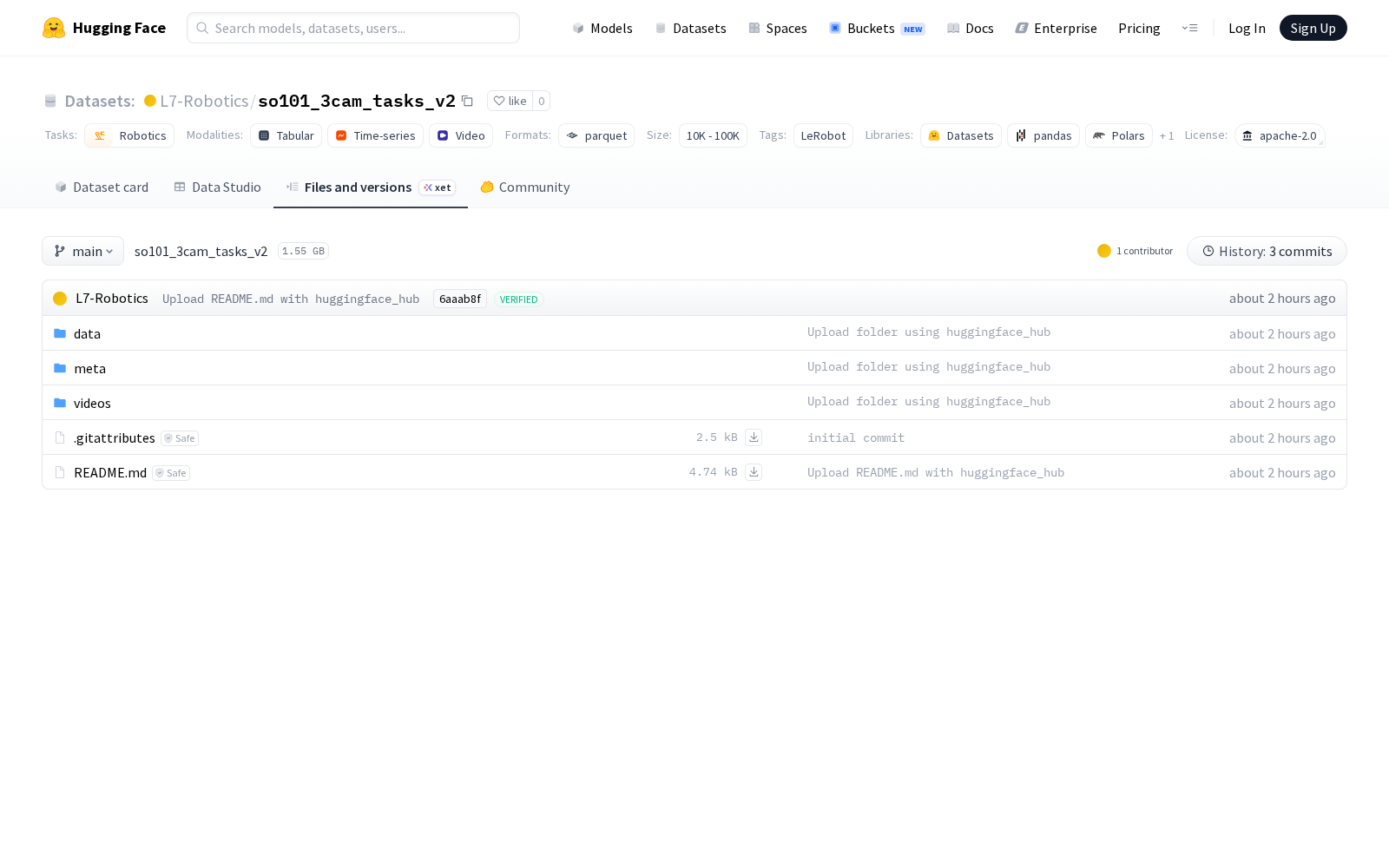
Files and versions内容:



_1769672084863.jpg)