

随着具身智能产业进入落地爆发期,机器人抓取操作能力作为工业自动化、仓储物流、家庭服务等场景的核心刚需,其算法迭代高度依赖场景化、结构化的高质量标注数据集。当前行业内通用抓取数据集较多,但针对特定物体、特定场景的垂直细分数据集供给仍存在明显缺口,成为制约细分场景机器人落地效率的核心瓶颈之一。
近日,开发者kunhsiang正式发布专项抓取数据集eval_exp10_grasp_the_green_box_20260507-193509,该数据集由知名具身智能开源项目LeRobot打造,首发上线全球最大的AI开源社区HuggingFace,面向全球研发者开放下载。
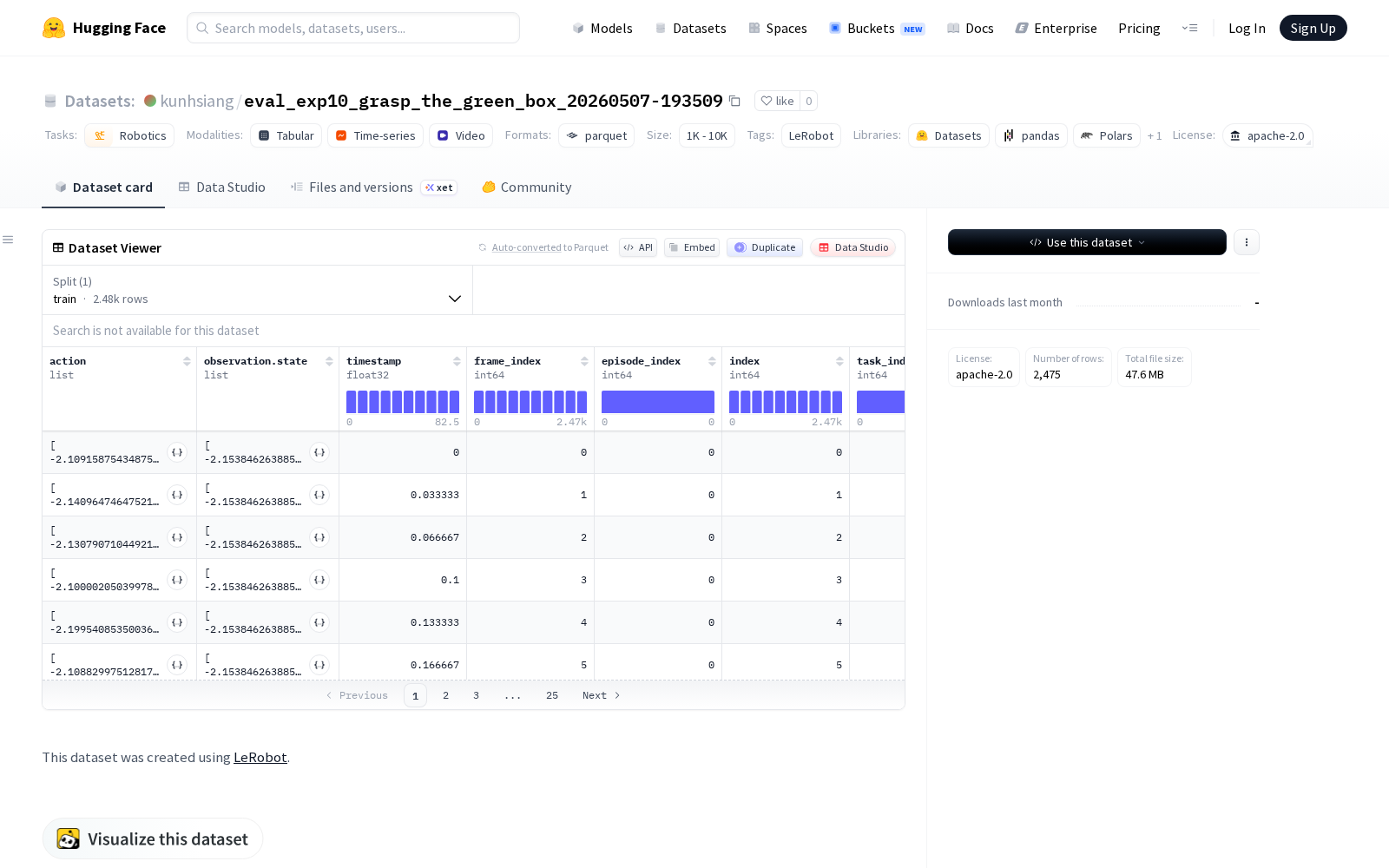
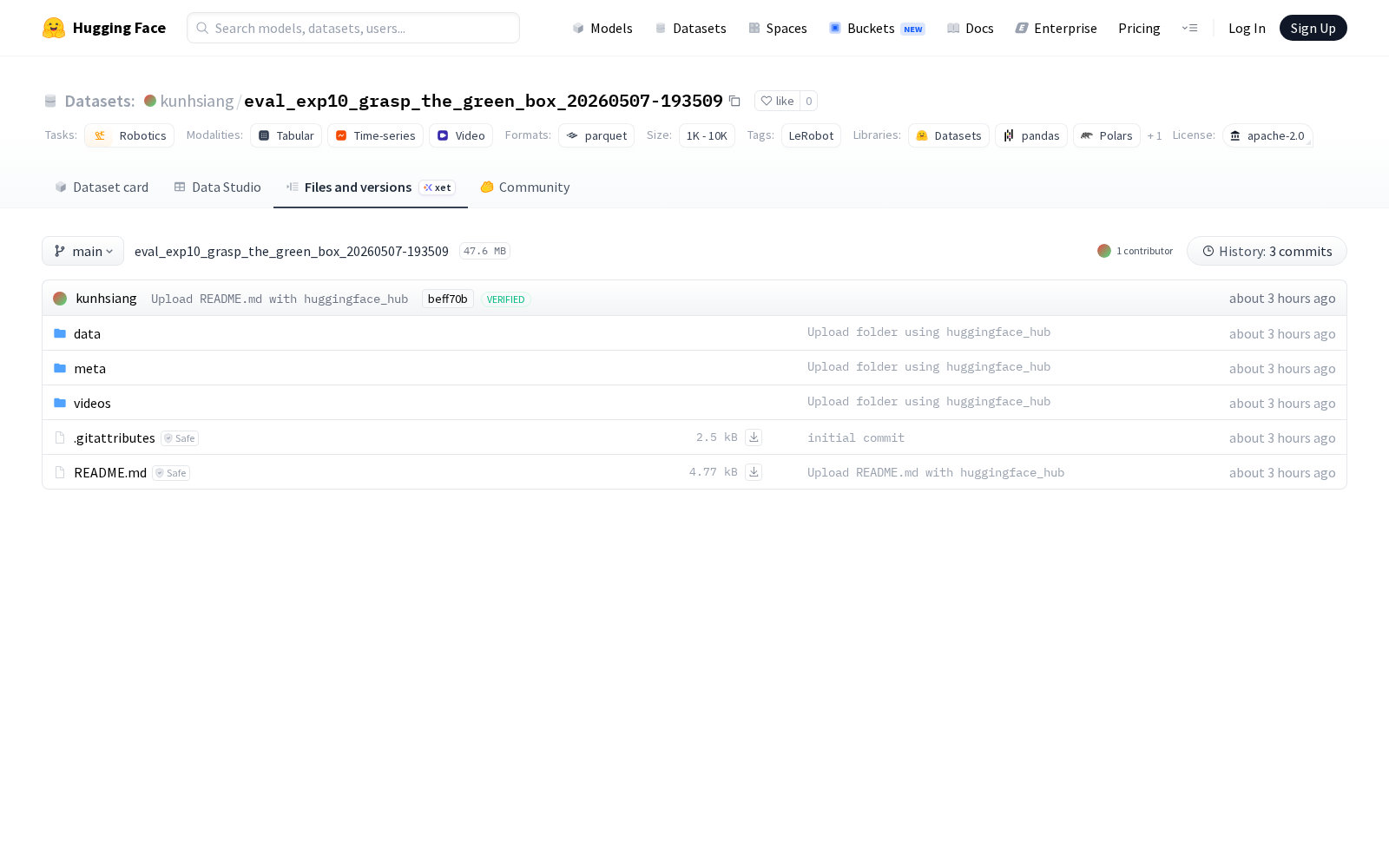
据公开信息显示,该数据集总帧数达2475,采集帧率为30fps,包含1个完整绿色箱体抓取任务与1个连续episode数据,覆盖机器人抓取全流程的动作参数、环境观测状态、多视角图像等多维度数据,所有数据的结构、特征(含数据类型、形状、字段名称等)均在meta/info.json文件中有明确标注,方便研发者快速调用适配。数据集采用apache-2.0开源许可证,支持商业使用,对中小研发团队、创业公司的算法研发十分友好。
作为聚焦绿色箱体抓取场景的专项数据集,其典型应用方向覆盖多个产业场景:在工业生产场景中,可用于训练流水线机器人对绿色包装物、绿色标识零部件的自动抓取分拣;在仓储物流场景中,可支撑AGV机器人、码垛机器人对绿色周转箱的识别、抓取与码垛操作算法优化;在具身智能算法研发环节,该数据集可作为标准化基准测试集,用于不同抓取算法的性能比对、抓取姿态优化、暗光/局部遮挡场景下的识别鲁棒性测试等,有效降低研发团队的自主数据采集成本,缩短算法迭代周期。
当前我国数据要素市场建设持续推进,AI训练数据作为核心数据品类之一,其开放共享程度直接影响人工智能产业的创新效率。本次该专项抓取数据集的开放,进一步丰富了具身智能领域的垂直数据集供给,对推动机器人抓取技术的落地应用、降低具身智能产业的研发门槛具有积极作用。
查看eval_exp10_grasp_the_green_box_20260507-193509
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)