

近年随着具身智能、农业无人化装备赛道的快速发展,真实作业场景下的多模态标注数据,尤其是融合机器人本体状态、环境视觉观测、时序同步信息的垂直场景数据集,一直是制约相关技术落地的核心瓶颈之一。近日,开源数据集平台tomato-store正式对外发布eval_smolvla_farm_harvest33专用数据集,该数据集率先于2026年5月7日上线HuggingFace,核心面向机器人动作控制、多摄像头观测两大研发场景开放。
据介绍,本次发布的eval_smolvla_farm_harvest33数据集基于LeRobot框架创建,LeRobot作为全球主流的机器人学习开源工具链,可实现机器人运行数据的标准化采集、标注与多源信息同步,有效保障了数据集的通用性与准确性。该数据集围绕bi_so_follower机器人的农业采摘作业场景采集生成,完整包含机器人的动作指令、执行反馈等核心运行数据,同时配套多机位摄像头的同步观测视频、机器人全周期状态参数、精确到毫秒级的时间戳对齐信息,可直接用于机器人相关模型的训练与效果验证,适配主流的机器人学习研发需求。
从典型应用场景来看,该类数据集可覆盖多个研发方向的需求:在农业采摘机器人研发侧,研发团队可基于数据集训练机器人的果实识别、路径规划、抓取力度校准等核心能力,大幅降低真实农田场景下的测试成本与试错风险;在多摄像头视觉技术研发侧,同步的多视角观测数据可支撑动态目标跟踪、多源视觉融合、作业场景三维重建等技术的迭代;除此之外,数据集也可用于设施农业无人化作业系统的调度逻辑验证、具身智能通用模型的农业场景微调等方向。
作为面向垂直作业场景的专用数据集,eval_smolvla_farm_harvest33的发布也为当前具身智能数据集生态的完善提供了有效补充。当前全球数据要素市场中,通用类视觉、文本数据集供给相对充足,但面向特定垂直作业场景、融合本体感知与环境感知的多模态时序数据集供给仍然存在缺口,此类细分数据集的开放,将有效降低中小研发团队的技术准入门槛,推动农业无人装备、具身智能技术的落地进程。
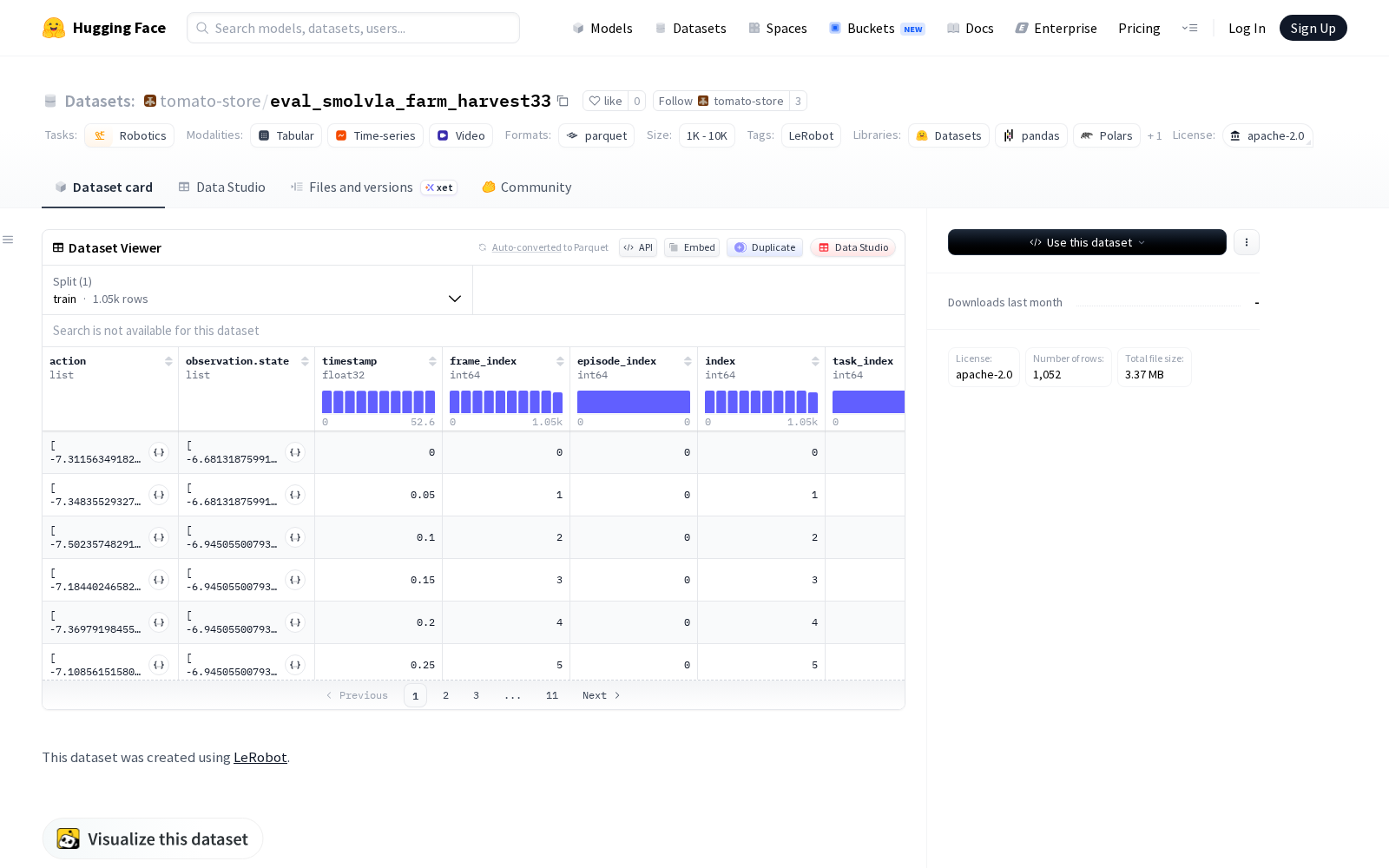
Dataset card内容:
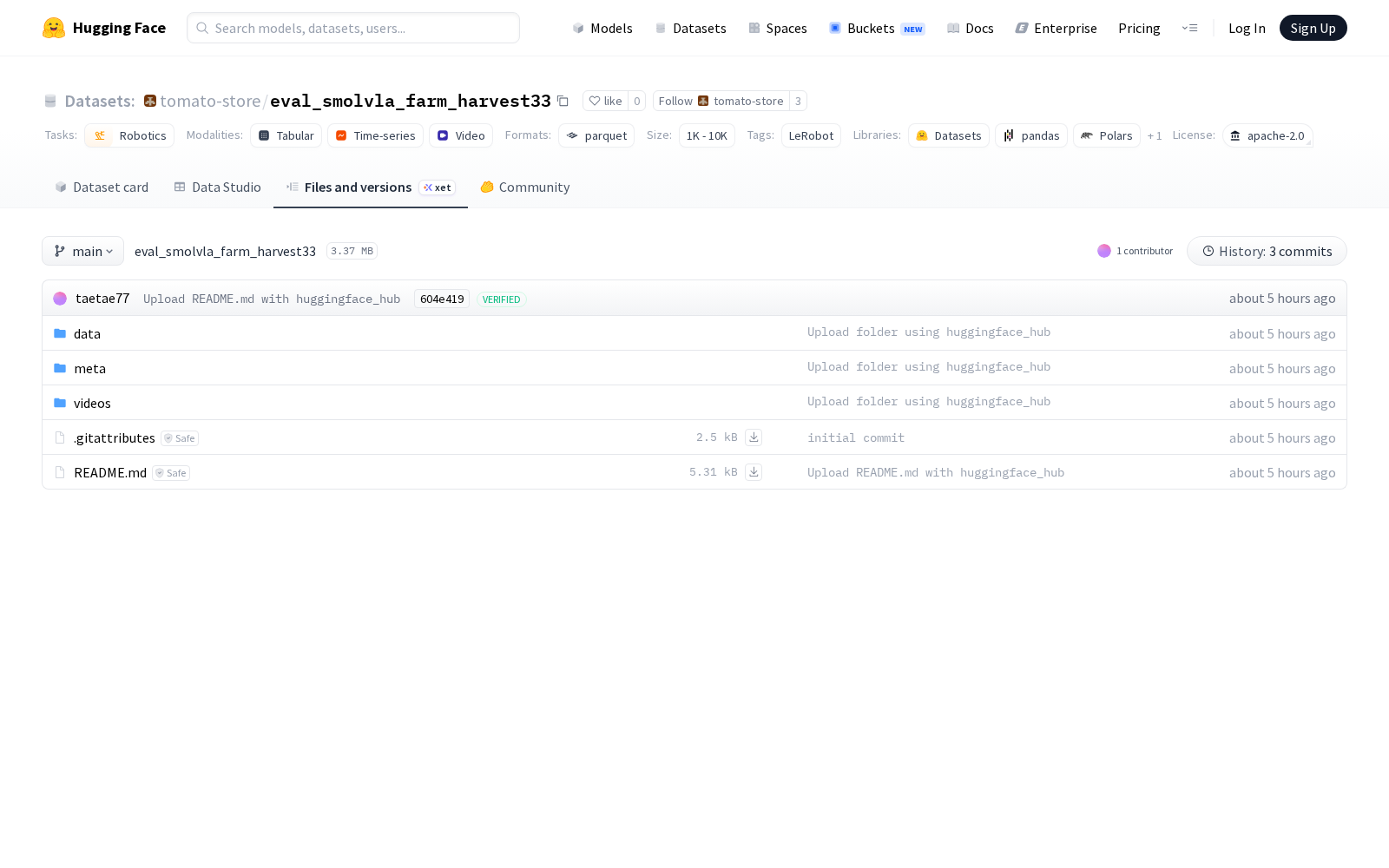
Files and versions内容:



_1769672084863.jpg)