

随着具身智能产业进入规模化落地关键期,机器人控制算法迭代、智能监测模型训练对多模态、高匹配度的场景化标注数据需求持续攀升,高质量垂直专用数据集已成为制约机器人研发效率的核心生产要素之一。2026年5月8日,Haku-2004正式上线由LeRobot创建的eval_act_so101_test_d专用数据集,该数据集首发于HuggingFace平台,定向服务于机器人动作控制、状态监测等研发场景。
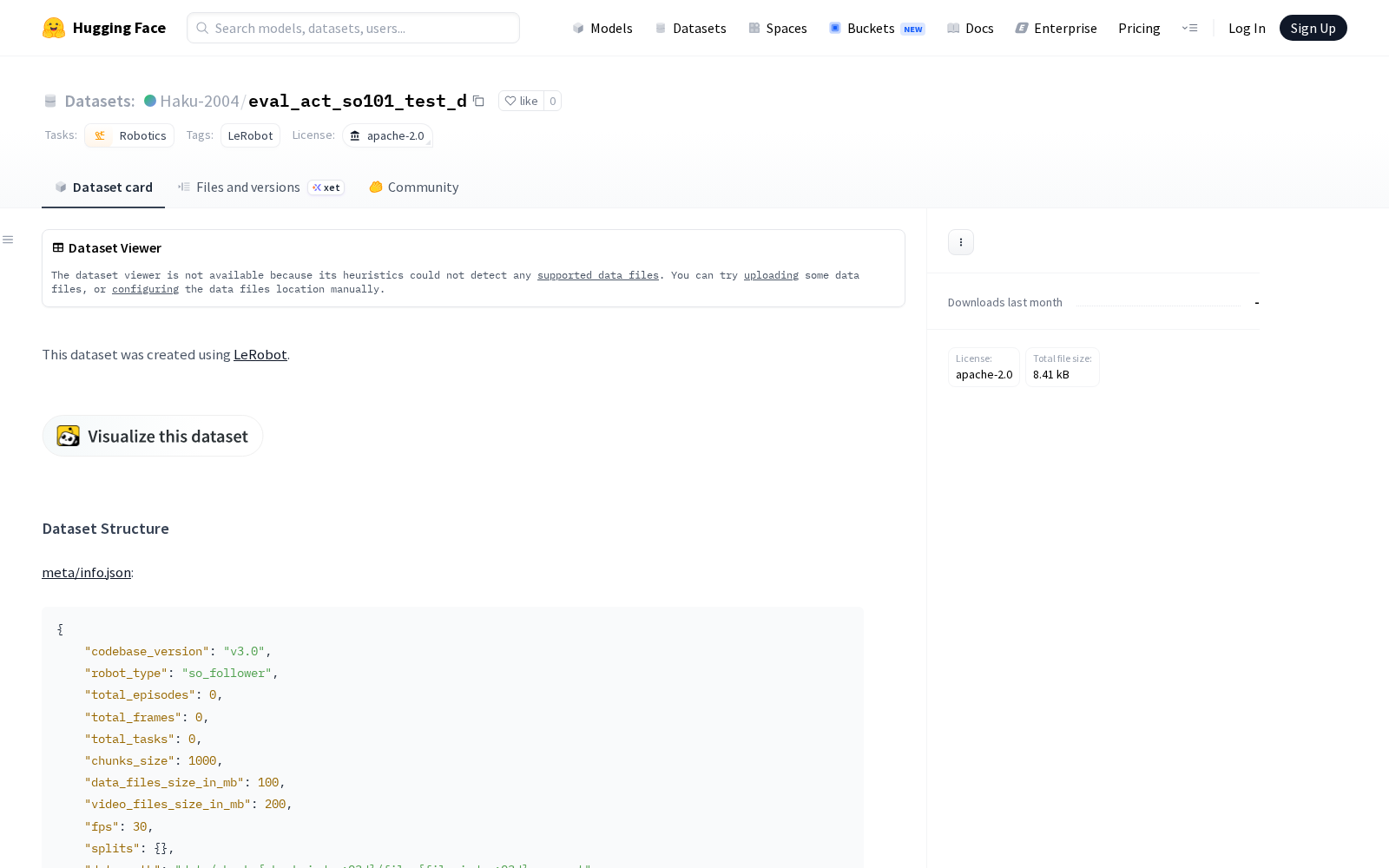
据公开信息显示,该数据集为机器人领域定向打造,核心数据包含两大维度:一是机器人运行核心参数,覆盖关节位置、夹持器位置等动作与状态观测数据;二是环境观测数据,包含机器人前视、侧视双视角的图像观测数据。存储层面,结构化数据采用Parquet格式存储、影像数据采用MP4格式存储,统一帧率为30fps,标准化的存储格式也降低了研发团队的数据预处理成本。
从潜在应用方向来看,该多模态匹配数据集可支撑多个机器人研发场景落地:在工业机器人领域,可用于机械臂关节精度校准、柔性抓取动作的强化学习训练,降低产线机器人部署的调试周期与成本;在服务机器人领域,结合多视角图像与机身姿态数据,可优化家用、商用服务机器人的移动避障、人机交互动作逻辑,提升复杂场景下的运行稳定性;在设备运维场景中,基于标准化的关节、夹持器运行时序数据,可训练机器人状态异常监测模型,实现设备故障的提前预警,降低工业场景的运维风险。此外,该数据集统一的采集与标注规范,也为不同研发机构的算法效果横向验证提供了统一的测试基准,有助于推动机器人研发领域的标准化协作。
Dataset card内容:
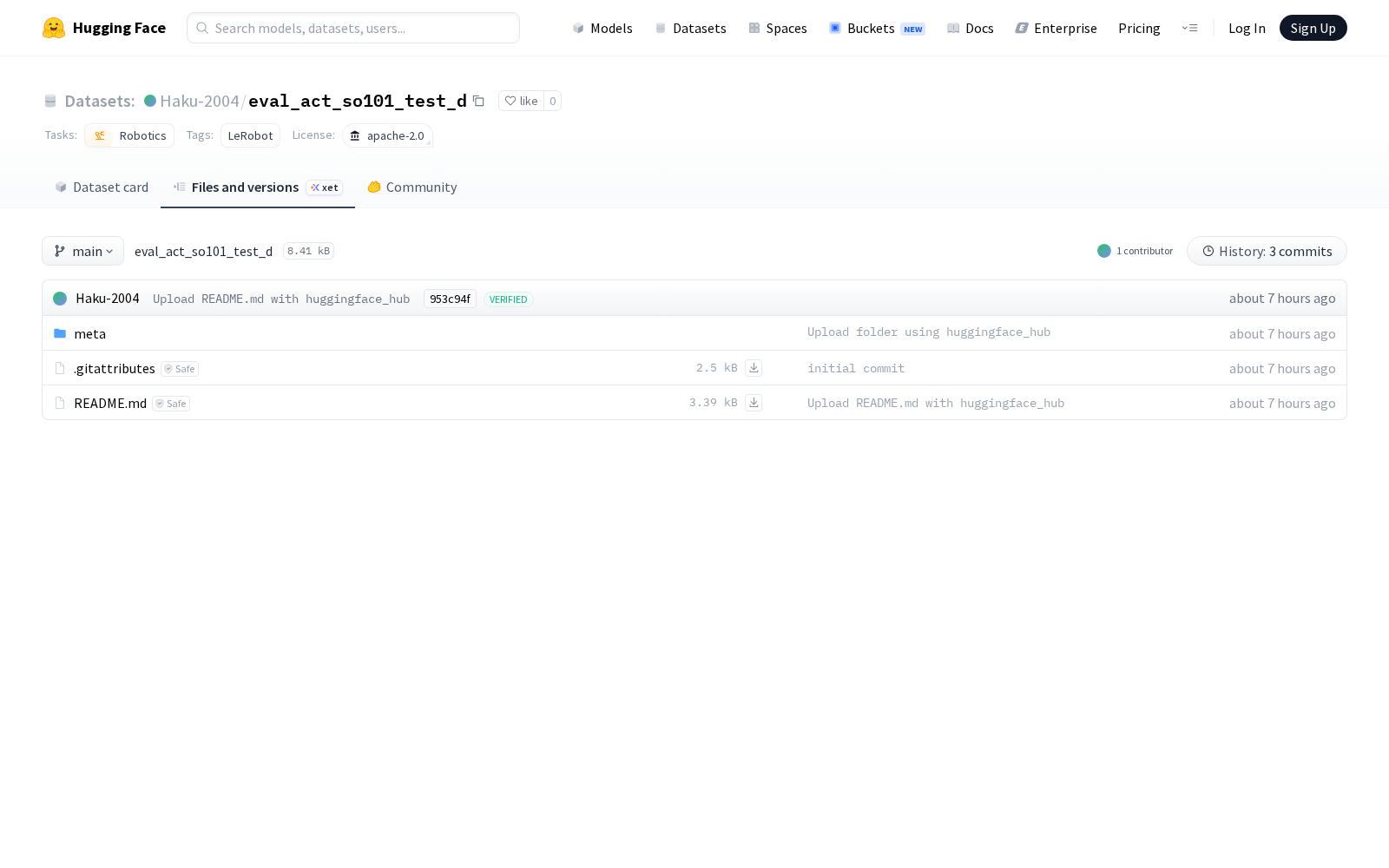
Files and versions内容:
当前我国数据要素市场建设正从通用化供给向垂直化细分方向演进,面向具身智能、自动驾驶、工业互联网等特定赛道的专用数据集供给占比持续提升。eval_act_so101_test_d这类垂直场景数据集的落地,不仅能降低机器人研发领域的数据获取门槛,也为细分领域数据资产的合规流通、价值释放提供了可参考的实践样本,进一步夯实数字经济核心生产要素的支撑作用。



_1769672084863.jpg)