

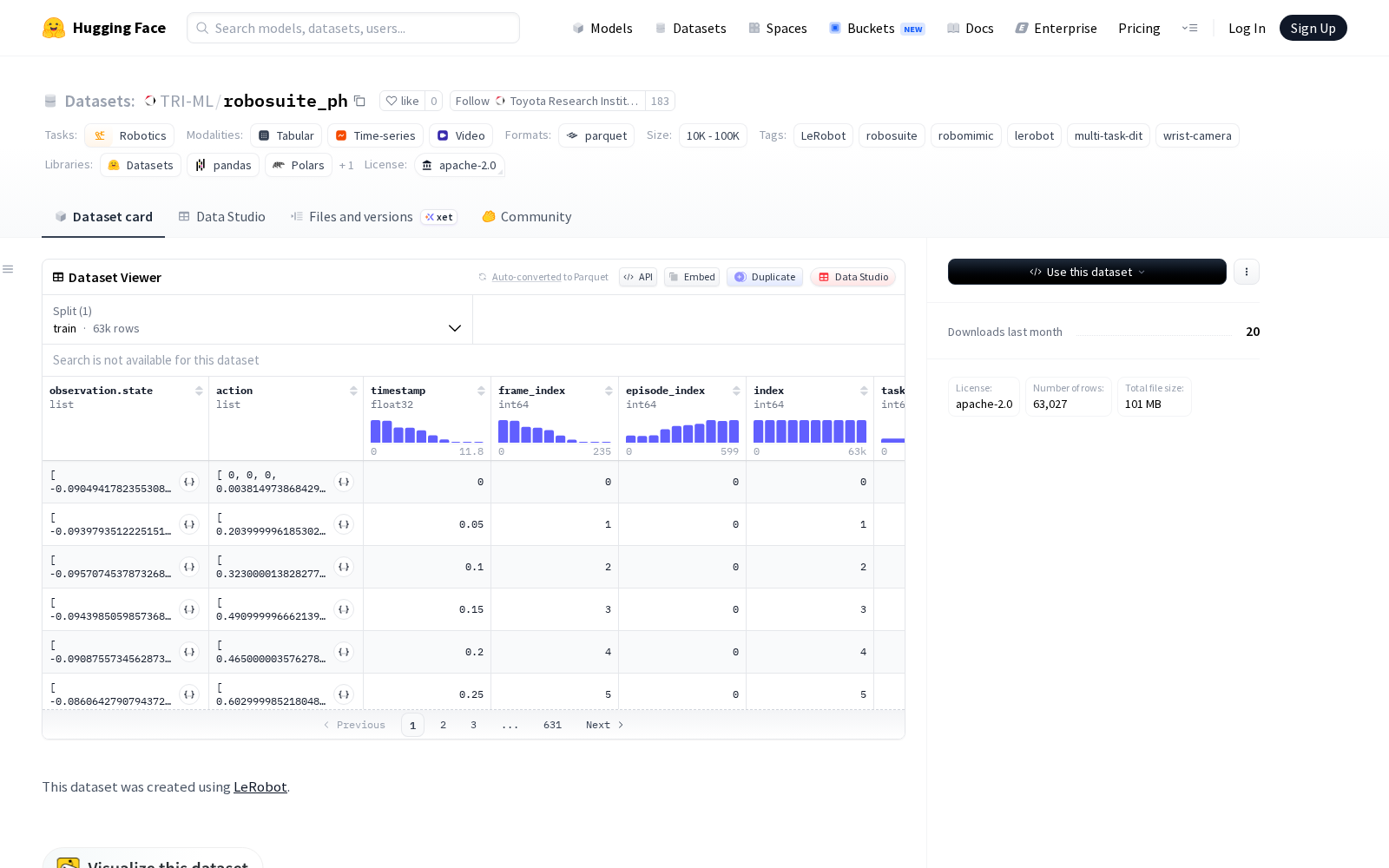
Toyota Research Institute本次发布的数据集robosuite_ph,该数据集是通过LeRobot创建的,专注于机器人技术领域。数据集包含从机器人视角和手腕摄像头捕获的视频数据,以及机器人的状态观察和动作数据。视频数据的分辨率为84x84,帧率为20fps,格式为AV1编码的YUV420P。状态观察数据包含32个浮点数,动作数据包含7个浮点数。数据集总共有600个episodes,63,027帧,涉及3个任务。数据以parquet文件格式存储,总数据文件大小为100MB,视频文件大小为200MB。适用于机器人学习、多任务决策等研究场景。数据集采用Apache-2.0许可证。
Dataset card内容:
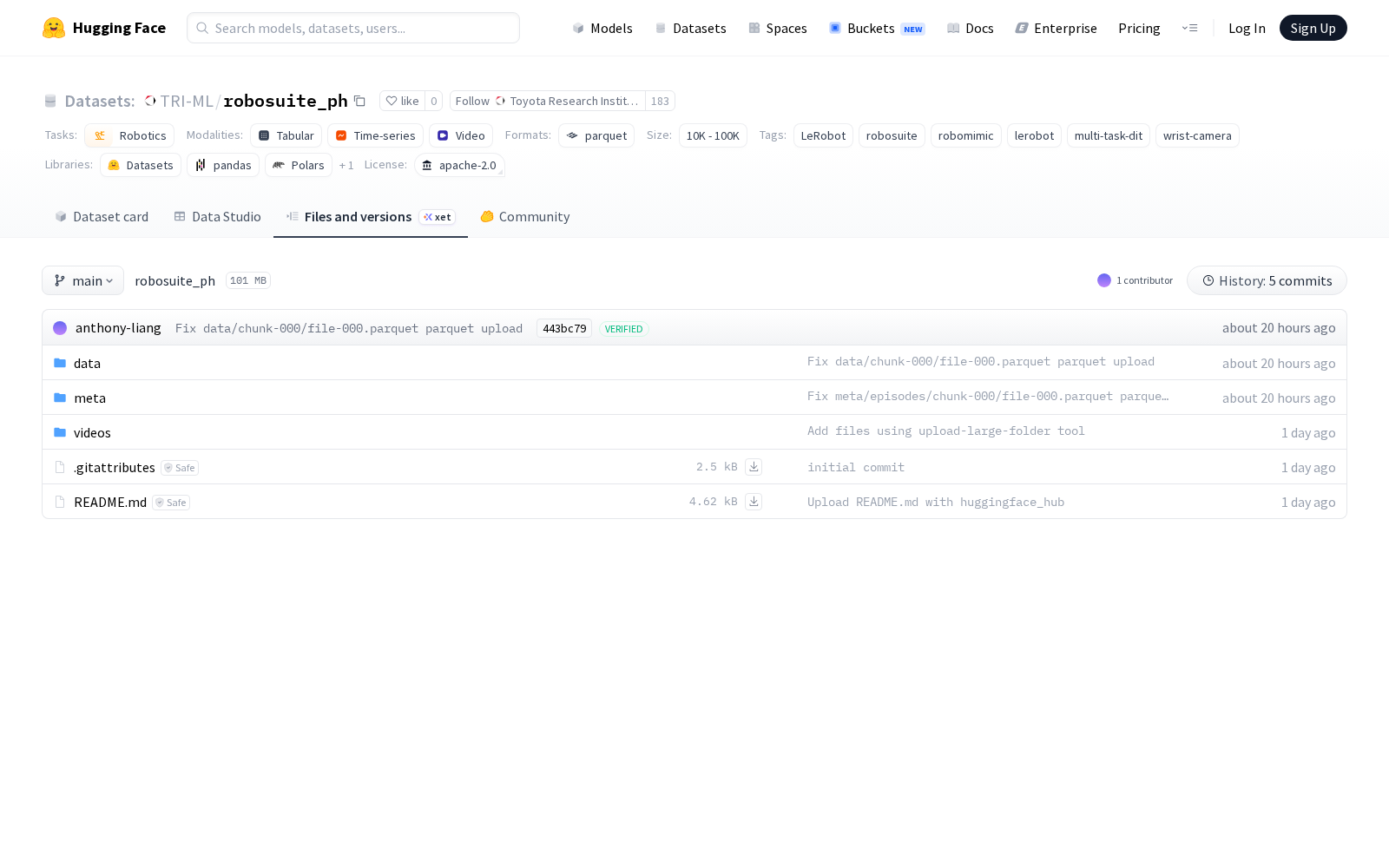
Files and versions内容:



_1769672084863.jpg)