

当前具身智能已成为全球人工智能领域的核心落地方向,而高质量、多模态的标注训练数据,是制约机器人学习算法迭代、降低研发门槛的核心基础资源。全球头部科技机构纷纷加大机器人专项数据集的开源力度,为产业发展提供公共支撑。2026年5月8日,丰田研究院(Toyota Research Institute,简称TRI)正式在Hugging Face平台首发robosuite_mg机器人领域专项数据集,该数据集由LeRobot团队打造,聚焦机器人学习与多任务决策研发需求。
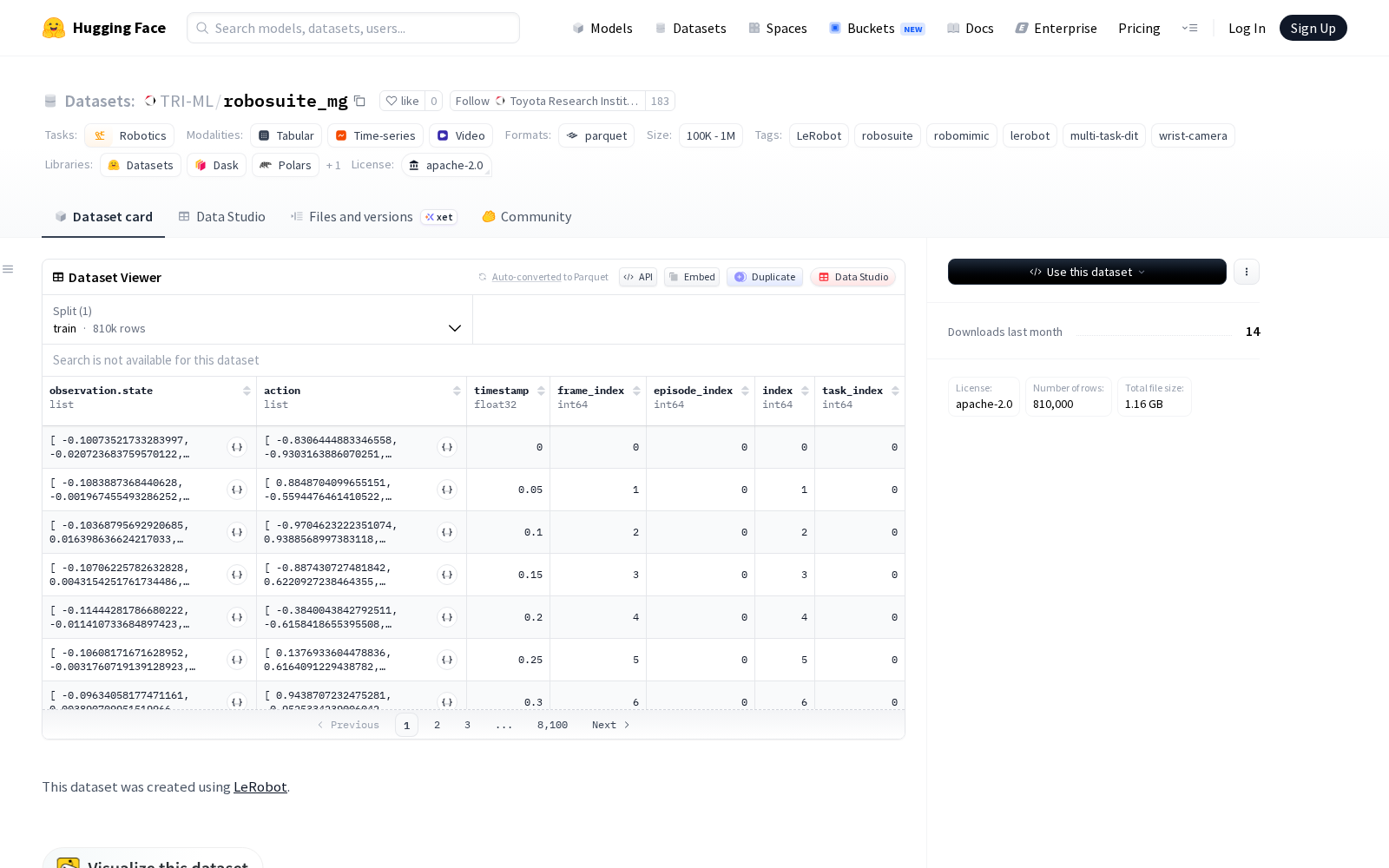
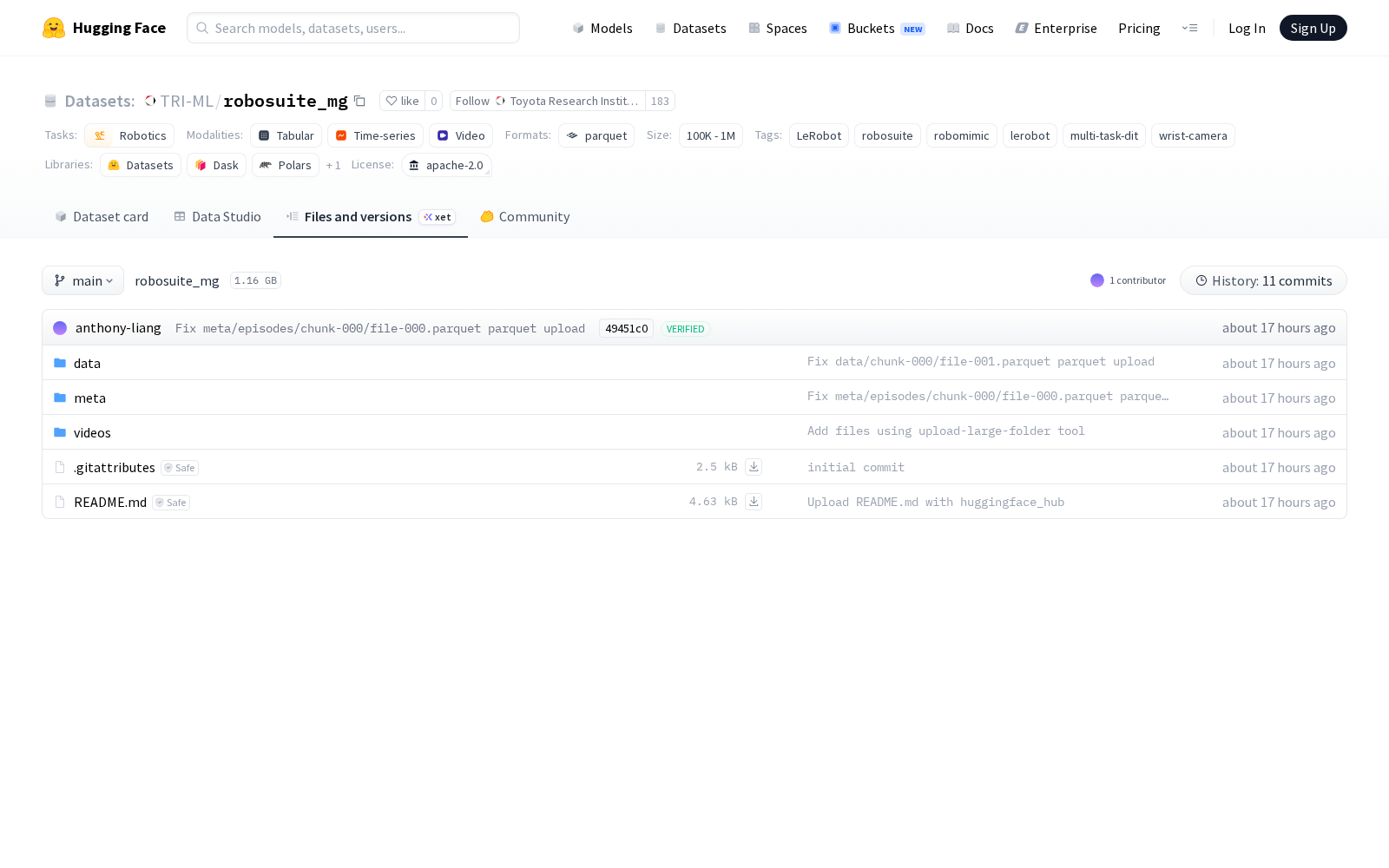
据公开信息显示,robosuite_mg数据集共包含5400个训练片段,累计810000帧标注数据,覆盖两类典型机器人作业任务;存储层面采用结构化数据与视频数据分离的方案,结构化标注数据以parquet格式存储,视觉数据则采用mp4格式封装,总大小仅101MB,便于研究人员快速下载调用。具体数据维度方面,该数据集同时包含84x84分辨率、20fps帧率、H.264编码的第三方视角(agentview)与机器人腕部第一视角两类视频数据,搭配32维float32类型的机器人状态观测值、7维float32类型的动作指令数据,同时配套了时间戳、帧索引、片段索引、任务索引等完整元数据,满足从视觉感知到动作控制的全链路算法训练需求。
从应用场景来看,该数据集的多视角视觉数据可支撑机器人视觉感知算法的训练与验证,包括目标识别、姿态估计、环境建模等方向;而动作数据与状态观测数据的配套,则可用于多任务动作控制模型、端到端机器人决策系统的研发,典型落地场景包括服务机器人的物品抓取与摆放任务训练、工业协作机器人的多任务切换调度算法优化、具身智能大模型的真实场景泛化能力测试等,覆盖学术研究、产业研发等多类使用需求。作为全球汽车领域头部机构开源的机器人专项数据集,robosuite_mg的发布也进一步丰富了全球具身智能领域的公共数据资源池,对于降低中小研发团队的数据采集成本、统一行业训练基准、加速机器人技术的产业化落地具有积极意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)