

当前全球机器人产业正处于技术落地的关键爆发期,无论是工业场景的协作机器人、民生场景的服务机器人,还是近年热度持续攀升的人形机器人,其AI算法的训练迭代都高度依赖多模态、高标注质量的真实运行数据集。但由于机器人场景数据采集成本高、标注复杂度大,高质量训练数据集的稀缺已经成为制约中小研发团队技术迭代的核心痛点之一。近日,机器人技术研发方Wayl正式发布编号为20260509_114150_sfp_01_train的专用训练数据集,该数据集已于2026年5月9日首发于全球最大的AI开源社区HuggingFace,面向全球开发者开放使用。
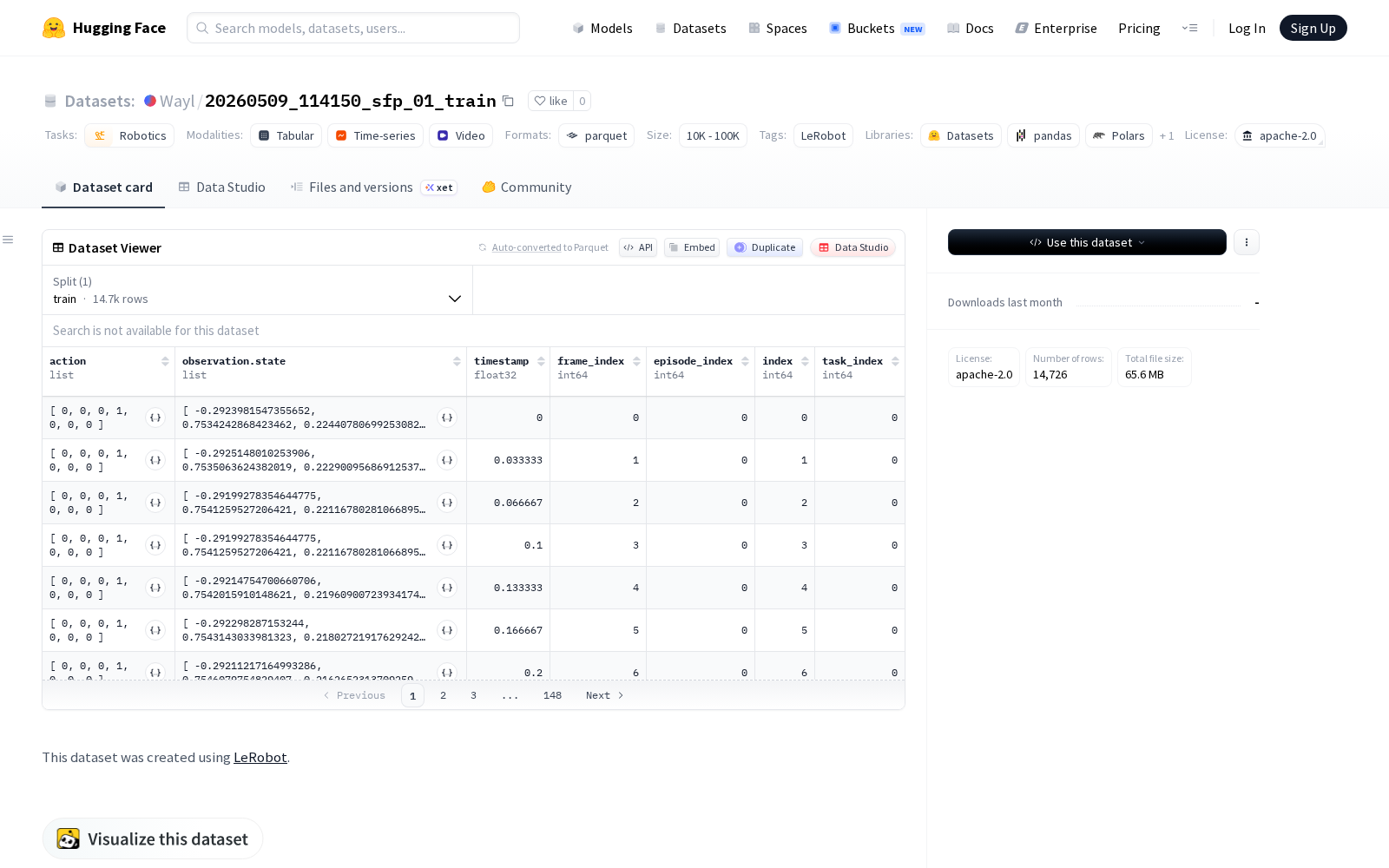
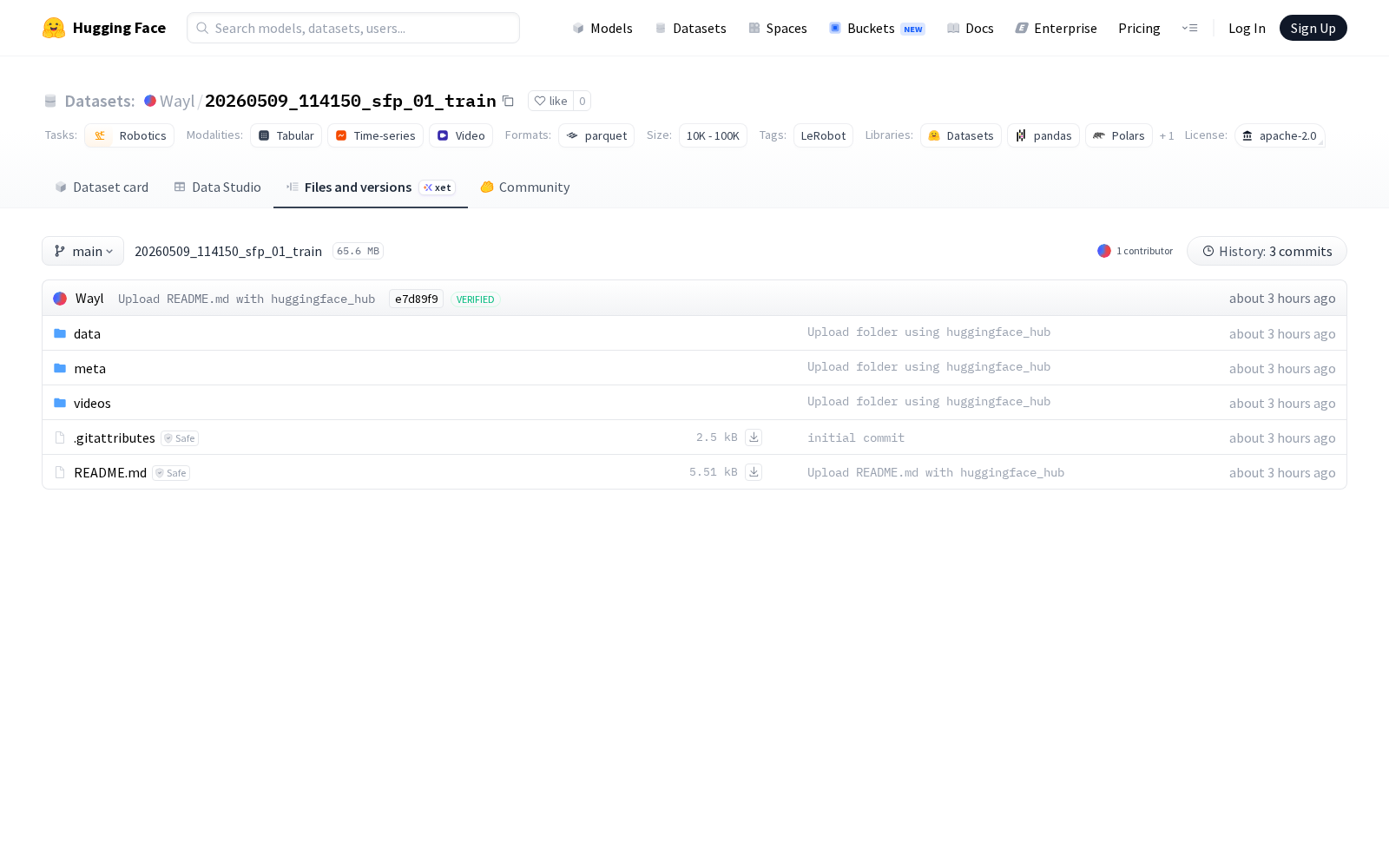
据介绍,该数据集基于HuggingFace旗下机器人研发工具集LeRobot构建,核心围绕机器人真实运行场景采集多维度数据,具体涵盖四大类核心数据字段:第一类为机器人动作指令与实际执行数据,可还原机器人的运动决策逻辑;第二类为观察类数据,既包含机器人自身的实时运行状态参数,也覆盖多个位置摄像头同步采集的多视角环境图像,可对应机器人视觉系统的真实输入信息;第三类为高精度时间戳,可实现所有维度数据的时序对齐;第四类为索引标识,方便开发者快速筛选所需数据子集。为了降低开发者的调用门槛,数据集配套提供了meta/info.json说明文件,详细标注了所有字段的类型、数据形状、采集参数等关键信息,无需额外做数据清洗适配即可快速接入训练流程。
值得关注的是,该数据集采用商用友好的Apache 2.0许可证开放,开发者不仅可以免费下载使用、修改数据集内容,还可用于商业产品研发,无需额外申请授权,大幅降低了研发团队的合规成本。从落地场景来看,该数据集可广泛应用于机器人视觉感知、机器人状态监测两大核心研发方向:在视觉感知领域,多视角图像与对应机器人状态的配对数据,可用于训练环境识别、障碍物避障、目标物体抓取定位、动态路径规划等算法,支撑服务机器人、工业协作机器人的场景适配能力提升;在状态监测领域,时序对齐的动作数据、状态参数可用于训练机器人故障预判模型、运行效率优化算法,也可为人形机器人的步态优化、力控调整等研发方向提供数据支撑,对推动机器人技术普惠化落地具有积极意义。
查看20260509_114150_sfp_01_train
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)