

随着具身智能技术的快速落地,工业机器人正从传统重复式示教作业向柔性化、自适应精细操作升级,而针对细分场景的高质量实采标注数据集,是训练机器人感知、决策、动作能力的核心基础资源。尤其是美纹纸这类质地柔软、易变形、表面摩擦力低的柔性物件,其拾取、定位、粘贴操作一直是工业自动化场景的难点,对应的训练数据供给长期存在缺口。
近日,数据提供方igaryo正式发布美纹纸拾取场景专用机器人多模态数据集rollout_dagger_pick_masking_tape_20260509_213949,该数据集于2026年5月9日首发于HuggingFace平台,是专门面向机器人操作、拾取任务领域打造的训练数据集。查看rollout_dagger_pick_masking_tape_20260509_213949
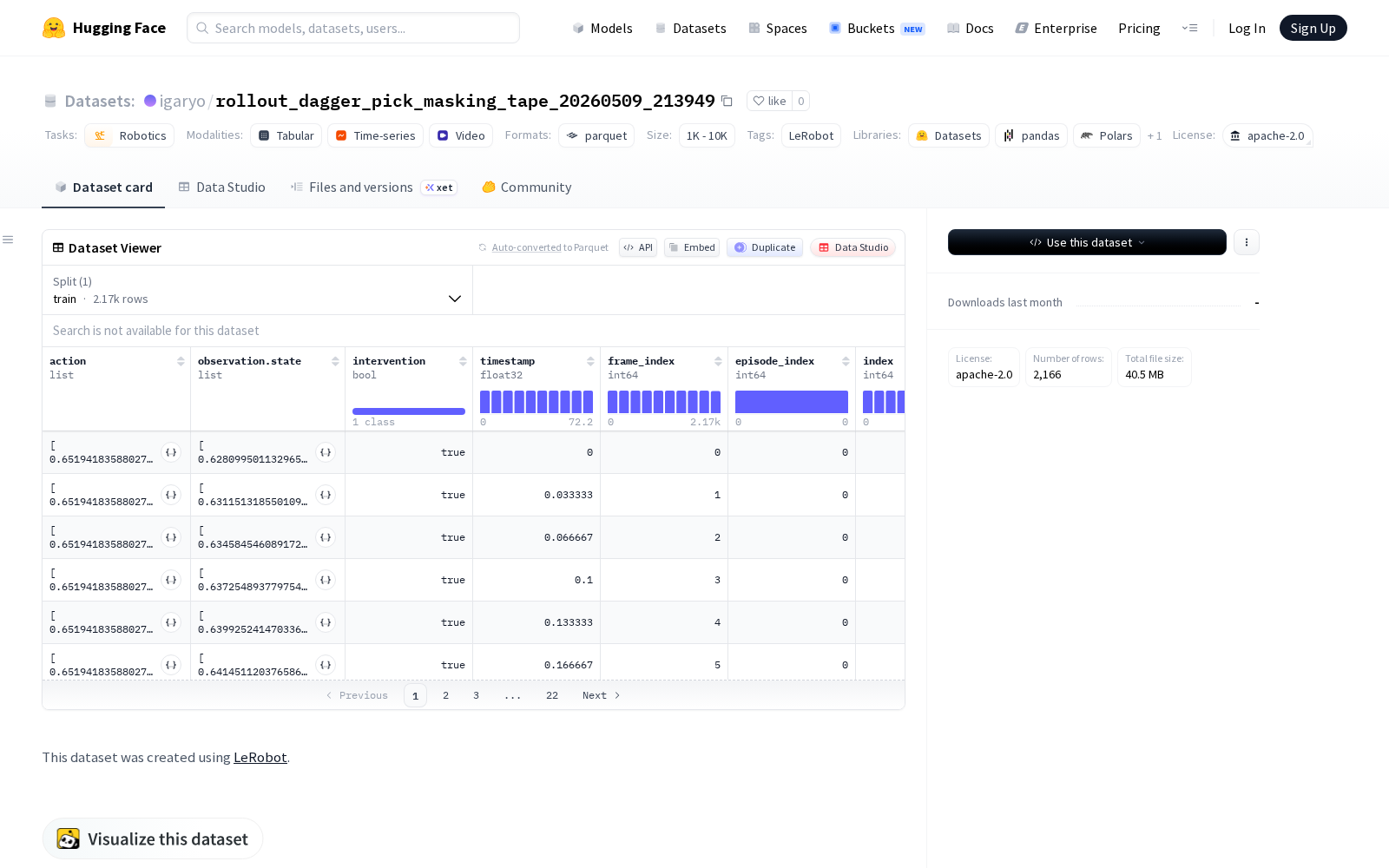
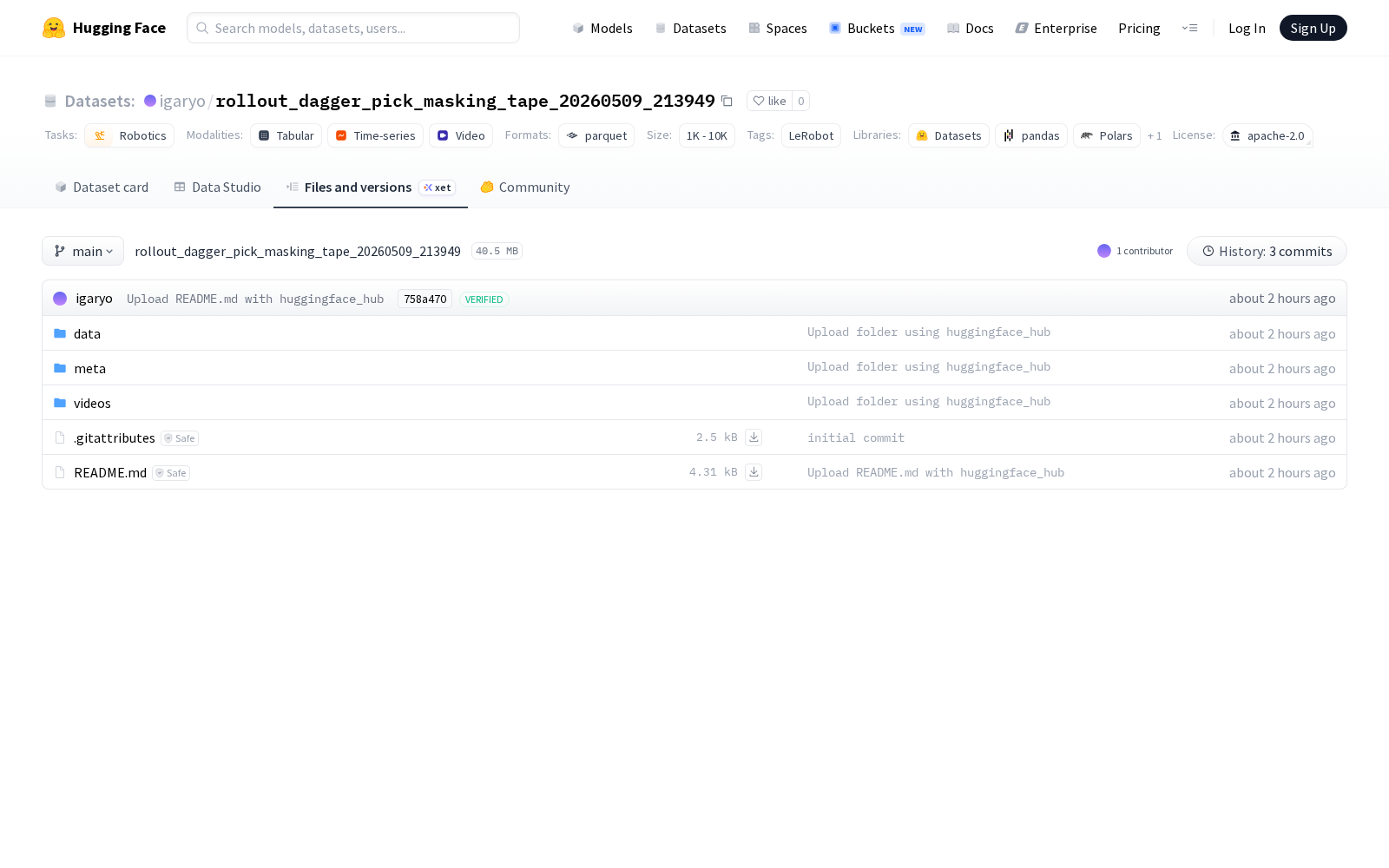
据介绍,该数据集为机器人动作与观测一体化多模态数据集,基于LeRobot开源机器人学习框架创建,覆盖完整的美纹纸拾取作业全流程。数据集包含机器人关节位置、夹持器开合状态、头部和腕部双视角摄像头同步视频等多维度观测数据,同时配套了对应时序的机器人动作指令标注,所有数据以30fps帧率采集,共有2166帧有效标注数据,分布在1个完整任务和1个episode中。数据集采用Apache 2.0开源许可证,支持科研与商业化场景的二次开发使用。
从行业应用来看,该数据集可广泛应用于多个场景的机器人技术研发:一是可作为柔性物件拾取任务的强化学习训练数据源,帮助研究者快速优化抓取策略,降低真实场景下的机器人试错成本;二是可作为Sim2Real(仿真到真实场景迁移)技术的验证数据集,验证仿真环境中训练的抓取算法在真实工业场景下的适配性;三是可用于多模态感知模型的训练,优化机器人对弱纹理、低反光柔性物件的视觉识别与定位精度。相关技术落地后,可支撑3C电子装配中的元器件遮蔽贴胶、汽车涂装前的零部件遮蔽、包装行业自动化贴胶等多个工业场景的机器人落地,助力工业制造环节的自动化升级。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)