

随着具身智能、工业机器人赛道的快速发展,末端灵巧操作能力已成为衡量机器人实用性的核心指标,而DAgger(数据集聚合)作为当前解决模仿学习分布偏移问题的主流算法,其训练效果高度依赖场景匹配度高、标注体系完善的场景化数据集。当前国内垂直场景的机器人训练数据供给缺口较大,高质量的实操采集数据集已成为行业刚需的核心数据资产。
近日,igaryo正式发布由LeRobot创建的rollout_dagger_pick_masking_tape_20260509_182246数据集,该数据集于2026年5月9日首发登陆HuggingFace平台,核心面向机器人拾取操作、DAgger算法训练领域的研发需求。
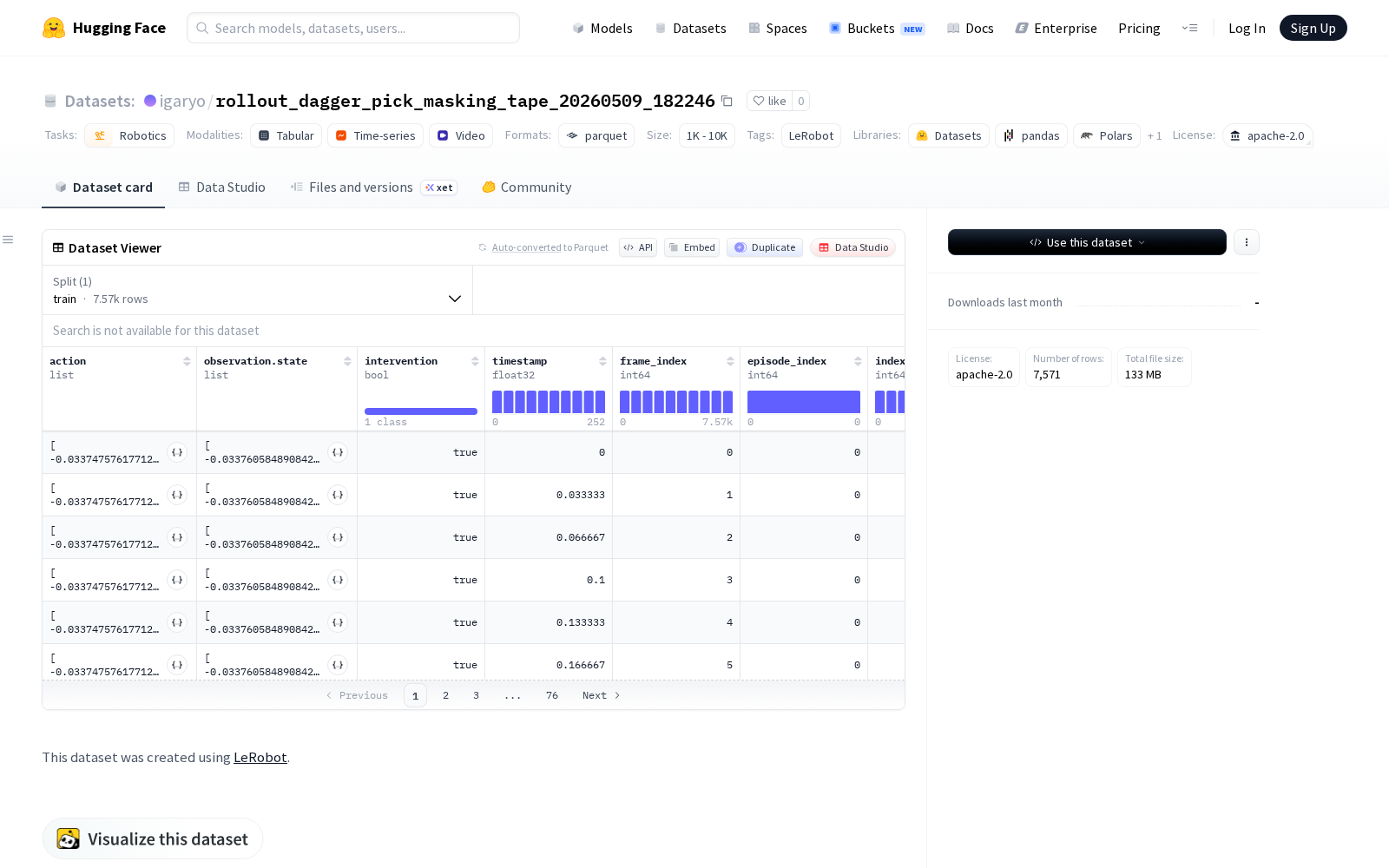
据官方披露信息显示,本次发布的数据集共包含7571帧有效采集数据,覆盖1个特定拾取任务与1个完整操作episode,数据主体采用兼容性更强的parquet格式存储,配套操作视频以mp4格式存储,数据集标注维度完整覆盖操作动作、机器人实时观察状态、现场视觉图像等核心特征,所有数据均基于dk1_follower型号机器人的真实操作场景采集,场景还原度、标注匹配度均符合具身智能算法训练的行业通用标准。
作为针对性覆盖美纹纸这类柔性薄型物料拾取场景的专用数据集,其可广泛应用于多个研发方向:一是工业流水线物料分拣场景的机器人训练,可帮助优化柔性物料的识别定位、抓取路径规划能力,降低生产环节的误捡、物料损耗率;二是DAgger等模仿学习算法的迭代优化,真实场景采集的多维度同步数据可有效降低算法训练的分布偏移问题,提升算法落地到真实场景的适配性;三是人形机器人末端夹爪的力控参数研发,真实机器人的实操数据可为末端执行器的力控调校提供参考依据,提升柔性物料拾取的操作稳定性。
查看rollout_dagger_pick_masking_tape_20260509_182246
Dataset card内容:
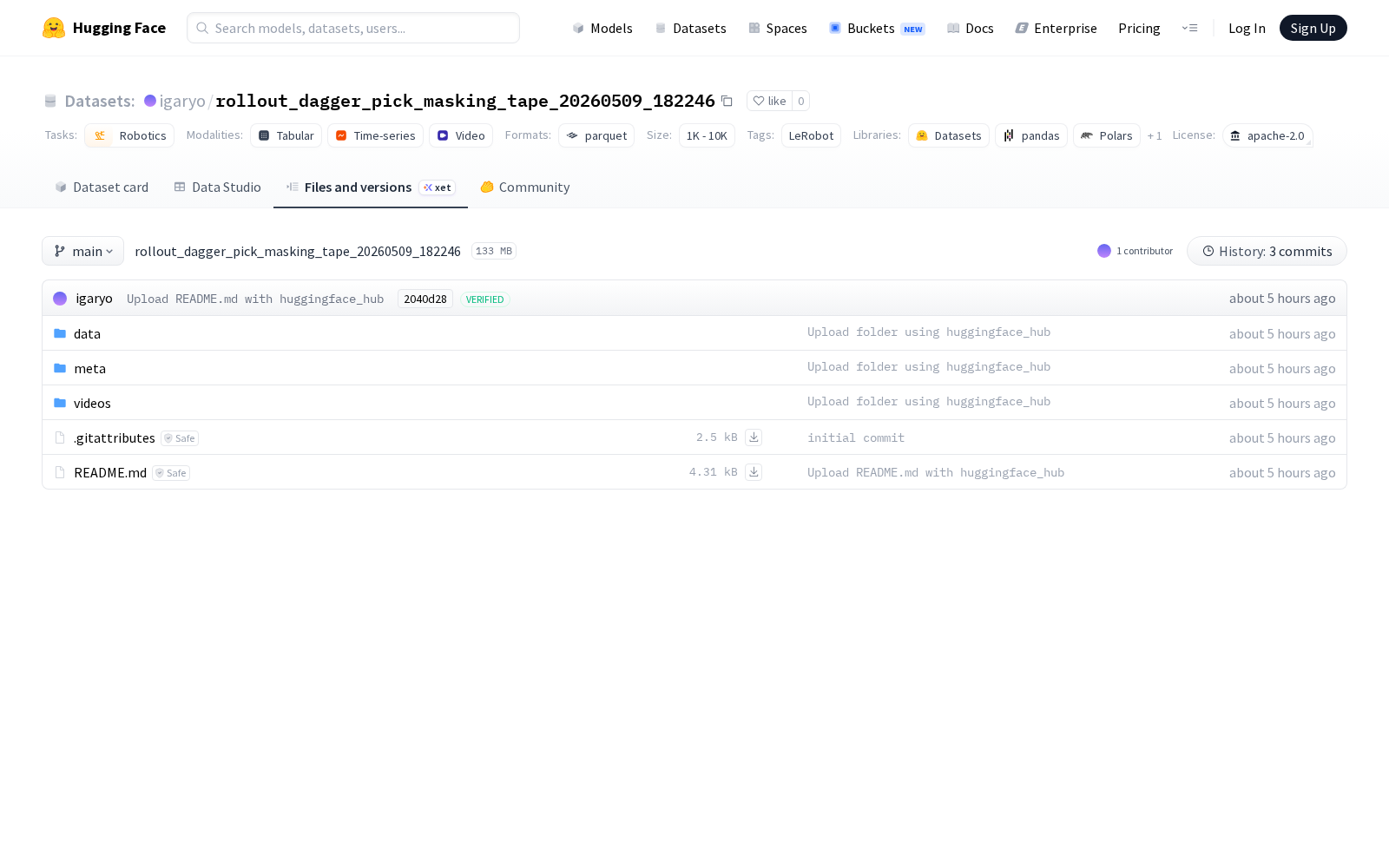
Files and versions内容:
从数据要素市场发展角度来看,本次数据集的公开上线,进一步丰富了国内具身智能垂直领域的训练数据供给,为中小研发团队降低了场景数据采集的成本门槛,也为后续细分场景专用数据集的开放共享、合规流通提供了可参考的落地范式,对推动机器人领域的技术落地与数字经济细分赛道的发展具有积极意义。



_1769672084863.jpg)