

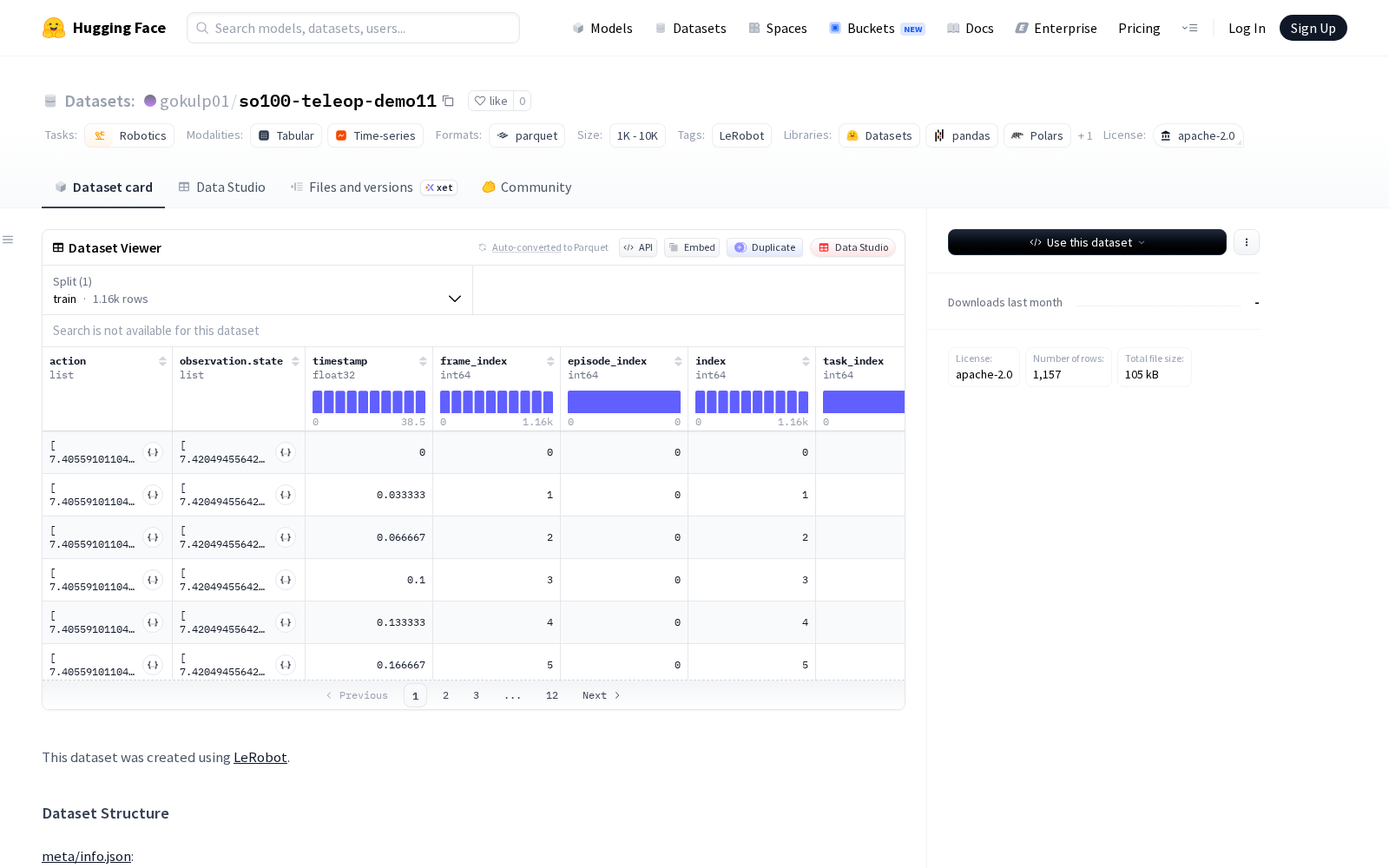
当前人形机器人、工业特种机器人正处于商业化落地的关键周期,机器人学习模型的训练高度依赖动作指令与环境感知配对的高质量标注数据,而远程遥操作场景下带时序关联的结构化数据集长期是机器人研发领域的稀缺资源。近日,开源开发者gokulp01正式发布so100-teleop-demo11专项数据集,该数据集基于业内通用的LeRobot机器人学习工具链构建,全部内容与机器人操作技术的研发需求高度匹配。
据公开披露的信息显示,该数据集完整收录了机器人操作全流程的动作数据与环境观察数据,核心特征维度涵盖动作执行状态、环境感知观察状态、全链路时间戳以及多维度样本索引标识,整体数据采用parquet格式结构化存储,同时配套对应操作场景的原始视频文件,方便研发人员根据自身研究方向灵活提取对应维度的训练样本,无需额外做复杂的数据清洗与标注处理。
从行业应用价值来看,该数据集可覆盖两大核心机器人研发场景:其一在机器人远程操作领域,时序精准对齐的动作-观察配对数据可用于训练遥操作模型的响应精度、降低端到端操作时延,为工业远程运维、高危特种场景作业、医疗远程手术机器人等细分场景的算法研发提供训练支撑;其二在机器人行为分析领域,结构化的动作索引与配套视频样本可用于机器人动作合规性检测、异常行为识别、人机协作场景下的动作意图预判等方向的技术验证。作为开源开放的公共训练数据资源,该数据集的发布也将有效降低中小机器人研发团队的训练数据获取门槛,助力机器人学习领域的技术普惠与创新迭代,进一步完善机器人产业的开源数据供给生态。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)