

当前具身智能已成为全球人工智能领域的核心赛道之一,而高质量的多模态对齐数据集,是支撑机器人感知、决策、控制全链路算法迭代的核心基础——长期以来,垂类场景下视觉信息与关节运动数据同步采集的数据集供给不足,是制约中小团队机器人研发效率的核心痛点之一。
近日,机器人领域研发主体Naomiihao正式上线由知名开源机器人项目LeRobot创建的多模态数据集banana_blue_bowl_1111,该数据集首发于全球最大的AI开源社区HuggingFace,面向所有研发主体开放获取,可广泛应用于机器人视觉控制、关节动作建模等研发场景。
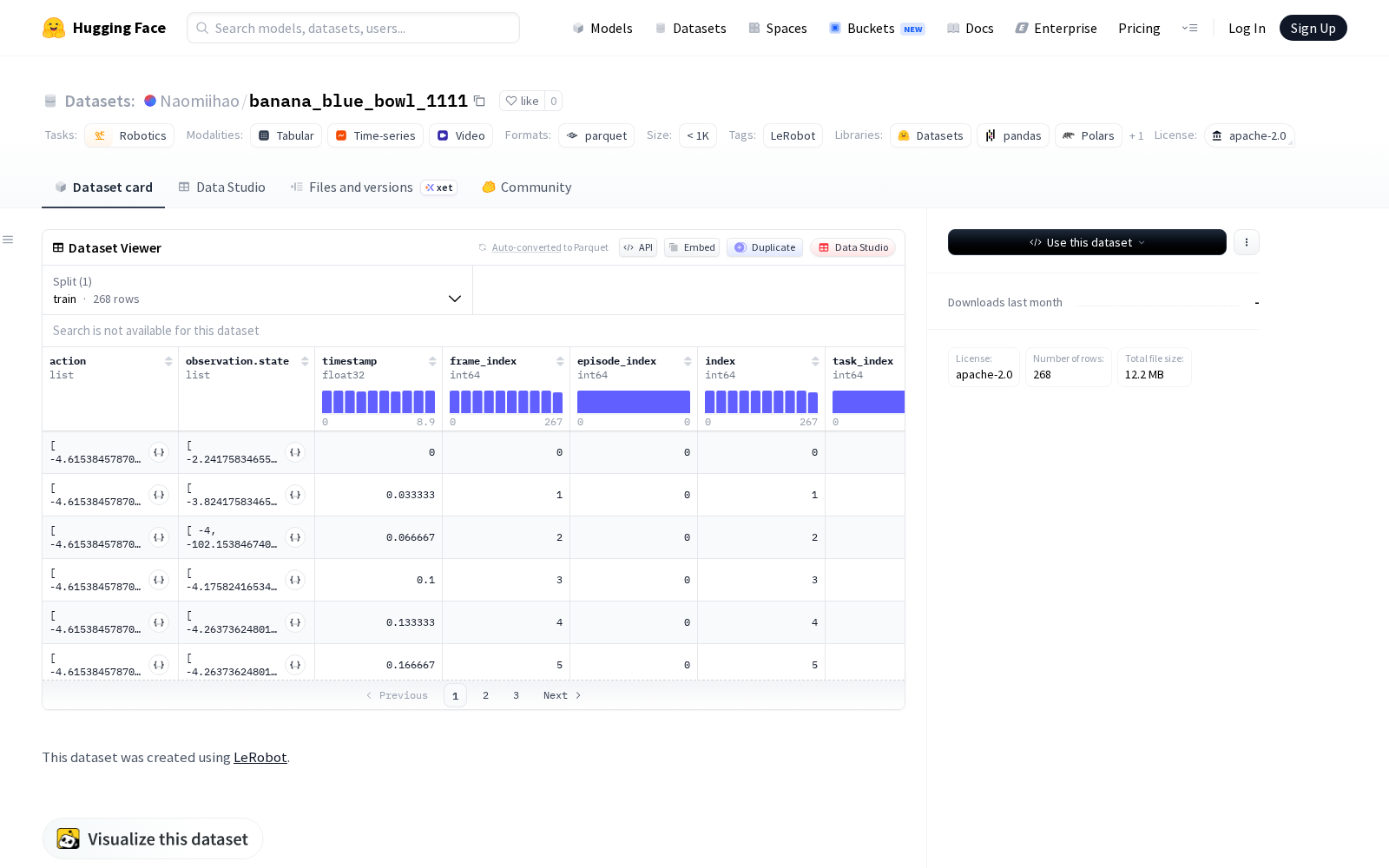
据公开信息显示,banana_blue_bowl_1111属于机器人垂类操作场景数据集,共包含268帧同步采集的多维度数据,采集帧率为30fps,配套RGB视频分辨率达1080x1920,可满足高清视觉识别任务的训练需求。数据集结构覆盖多模态核心字段,包括6个关节位置的动作特征、6个关节位置的观测状态特征、前端RGB视频观测数据,以及配套的时间戳、帧索引、任务索引等标注信息,所有结构化数据以高效压缩的parquet格式存储,视频素材采用通用mp4格式存储,大幅降低研发团队的数据处理门槛。
从应用价值来看,该数据集实现了视觉感知信息与机器人关节运动数据的精准对齐,可支撑多个细分方向的研发需求:在机器人视觉控制领域,研发团队可基于该数据集训练视觉引导的机械臂操作算法,面向桌面级物品抓取、摆放、分拣等日常操作场景,优化视觉输入到动作输出的映射精度,提升机器人在非结构化场景下的操作稳定性;在关节动作建模领域,该数据集的关节位置时序数据可用于训练机器人轨迹规划、柔顺控制算法,优化关节动作的流畅度与精准度,减少冗余动作,降低机器人操作的能耗与安全风险;此外,该数据集也可作为具身智能多模态大模型的训练素材,助力打通视觉感知与运动控制的模态鸿沟,支撑端到端具身大模型的研发迭代。
作为机器人垂类场景的高质量开源数据集,banana_blue_bowl_1111的发布进一步丰富了国内具身智能领域的数据集供给体系,可有效降低相关研发团队的原始数据采集成本,缩短算法训练周期,对加速机器人技术从实验室到落地场景的迭代进程、推动数据要素在人工智能实体经济融合场景的价值释放具有积极意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)