

近年来,随着具身智能、服务机器人、工业移动机器人赛道商业化落地加速,多摄像头视觉感知、动态目标跟随导航已经成为行业共性技术需求,而覆盖真实场景、标注完善的专用数据集,是支撑算法训练、降低研发门槛的核心数据要素资源。尤其是针对机器人跟随场景的多视角同步数据集,由于采集成本高、场景标注复杂,行业公开供给一直相对稀缺,成为制约中小团队技术研发的核心瓶颈之一。
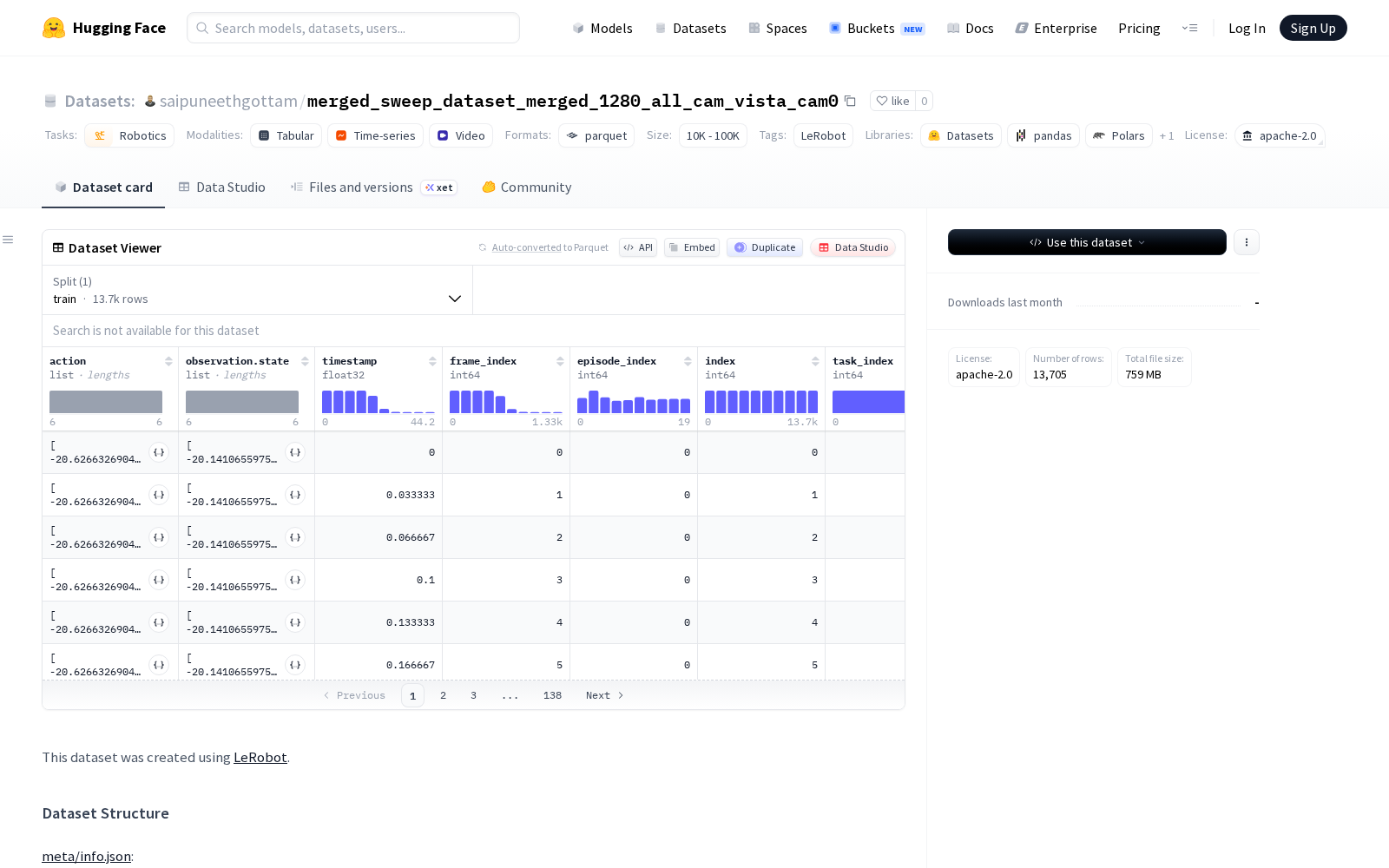
近日,开发者saipuneethgottam在全球最大的AI开源社区HuggingFace首发了机器人跟随场景专用数据集merged_sweep_dataset_merged_1280_all_cam_vista_cam0,为相关领域研发团队提供了新的训练数据选择。据公开元数据信息显示,该数据集由LeRobot工具创建,适配so101_follower型号机器人的研发需求,共包含20个采集片段、13705帧有效数据,覆盖1项核心跟随任务,数据特征维度涵盖机器人动作指令、运行状态参数、多个摄像头同步采集的视觉图像、时间戳、数据索引等多源信息,存储采用结构化数据通用的parquet格式加原始视频文件的组合方案,兼顾了算法训练的便捷性与原始数据的可追溯性。
从数据特征来看,该数据集可广泛应用于多个技术方向的研发:在服务机器人领域,可用于训练家庭陪伴机器人、商场导览机器人的动态人形跟随、动态场景避障算法;在工业场景下,可支撑巡检机器人、仓储跟随机器人的多视角环境感知、动态路径规划研发;在具身智能通用技术领域,还可用于跨摄像头视觉对齐、多传感数据融合、动态目标识别等算法的训练与验证。
该数据集的发布,进一步丰富了机器人领域公开数据集的供给结构,有助于降低中小研发团队的前端数据采集成本,加快跟随导航、多摄像头感知相关技术的落地迭代,推动移动机器人、具身智能产业的技术普惠。
查看merged_sweep_dataset_merged_1280_all_cam_vista_cam0
Dataset card内容:
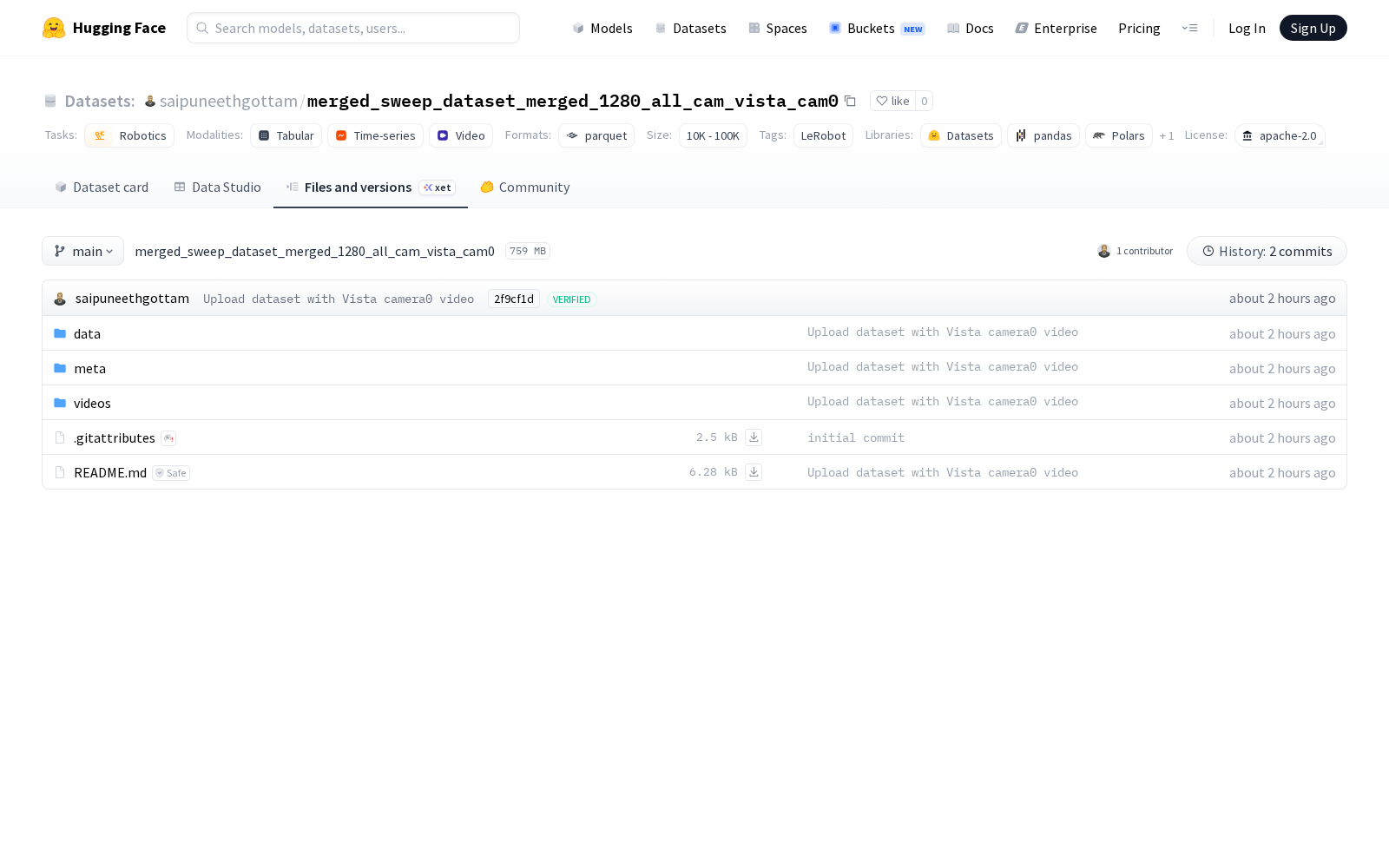
Files and versions内容:



_1769672084863.jpg)