

近年具身智能、工业机器人赛道快速扩容,针对精细操作场景的标准化训练数据,已经成为制约机器人动作控制精度、视觉反馈响应效率的核心瓶颈之一——不同于通用视觉数据集,机械臂操作类数据集需要同时匹配运动学参数、多视角视觉输入、时序标注等多维度信息,数据采集与标注门槛极高,优质垂直场景数据的供给缺口长期存在。近日,开源开发者devaj-g正式发布Bread-flip-cleaned专用数据集,该数据集首发于全球最大的AI模型与数据集共享平台HuggingFace,重点面向机器人动作控制、视觉反馈系统研发场景开放使用。
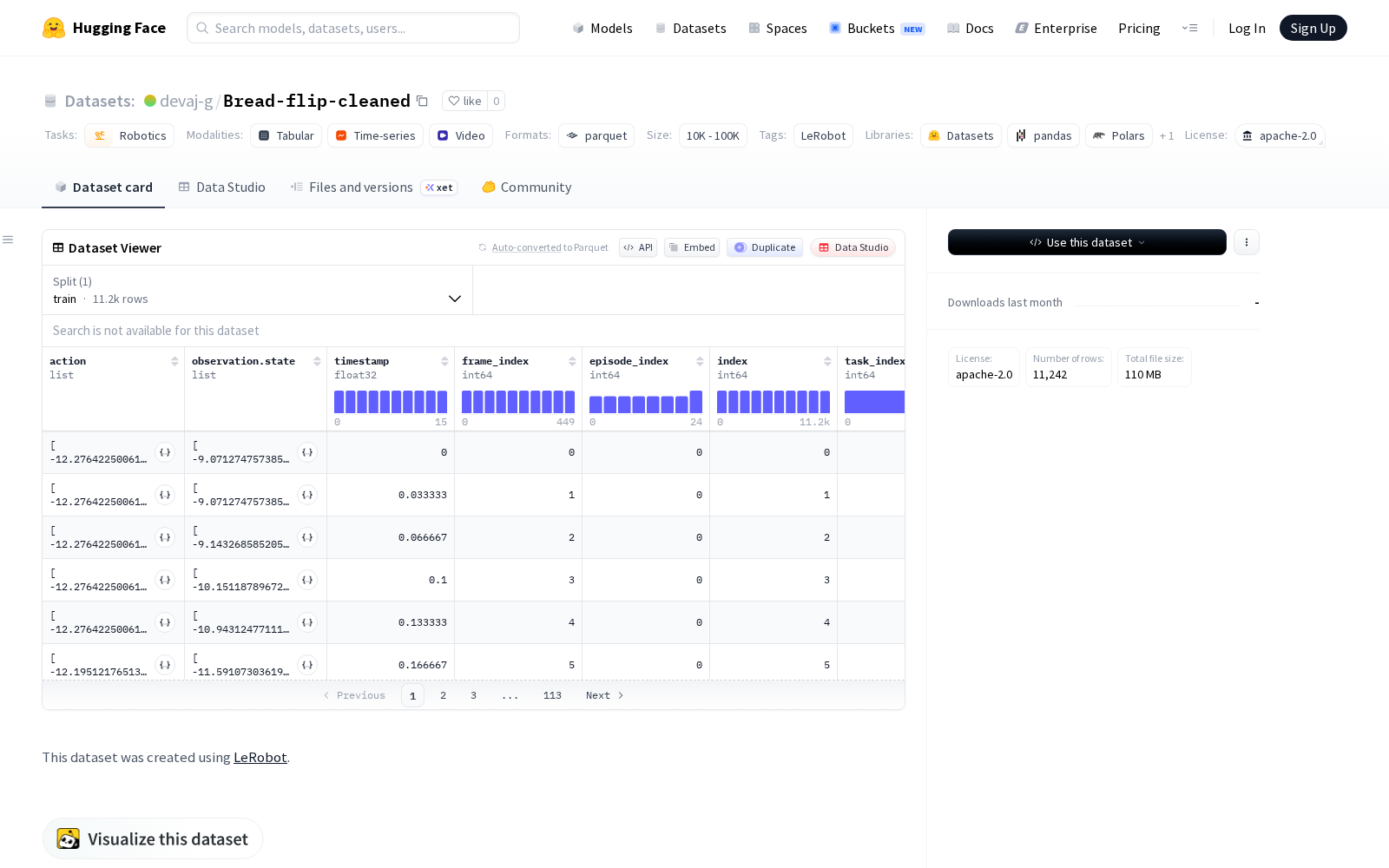
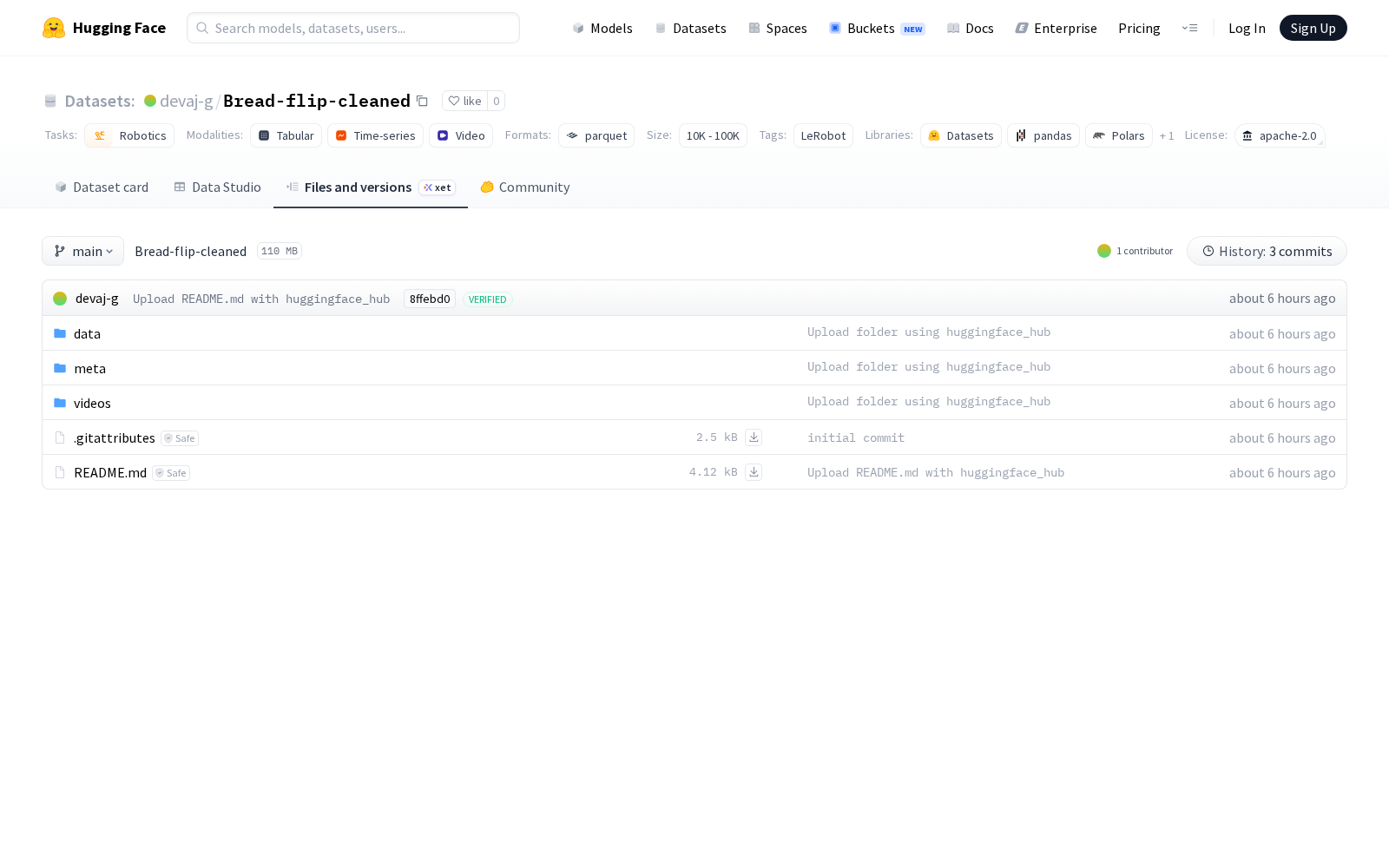
据公开信息显示,Bread-flip-cleaned数据集完整收录了机械臂完成翻转操作的全流程运动数据与多源观测信息,核心数据维度包含机械臂6个关节的实时位置数据、手部摄像头与前部前置摄像头采集的480x640分辨率视频帧,同时配套了完整的时间戳、帧索引标注,数据集说明文档也明确公示了整体数据格式、存储大小、特征维度等核心信息,方便研发团队快速调用适配,无需额外做数据清洗和结构化处理。
从行业应用来看,该数据集的多模态标注特性,可支撑多个细分场景的技术研发:一是可用于工业机械臂精细操作模型训练,尤其是食品加工、3C制造领域的分拣、翻转、装配等低容错率操作场景,帮助优化动作轨迹规划精度,降低试错成本;二是可为机器人视觉伺服系统研发提供训练数据,验证“视觉输入-动作调整”的闭环反馈逻辑,提升复杂环境下的操作稳定性;三是可用于多模态具身智能模型的微调,降低中小研发团队的自主数据采集成本,加速技术落地周期。作为具身智能领域的细分场景数据集,Bread-flip-cleaned的发布也进一步丰富了全球开源数据要素供给,为机器人领域的技术创新提供了标准化的数据底座,符合当前数据要素向垂直行业下沉、支撑实体产业数字化转型的整体发展趋势。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)