

当前全球人形机器人、协作机器人产业正进入爆发增长期,运动控制算法的迭代效率已成为制约机器人落地应用的核心瓶颈,而高质量的多模态标注数据集是算法训练的核心基础。过去机器人运动数据普遍存在采集成本高、标注维度不全、时序匹配精度低等问题,尤其是面向工业场景、服务场景的行为模仿类算法,对同步覆盖姿态参数、视觉感知、时序标签的专项数据集需求尤其迫切。
在此背景下,开发者ntkhoa于2026年5月10日在全球最大的AI开源社区HuggingFace首发了由LeRobot创建的机器人领域专项数据集record-test_20260510_183957,面向全球开发者开放下载使用。
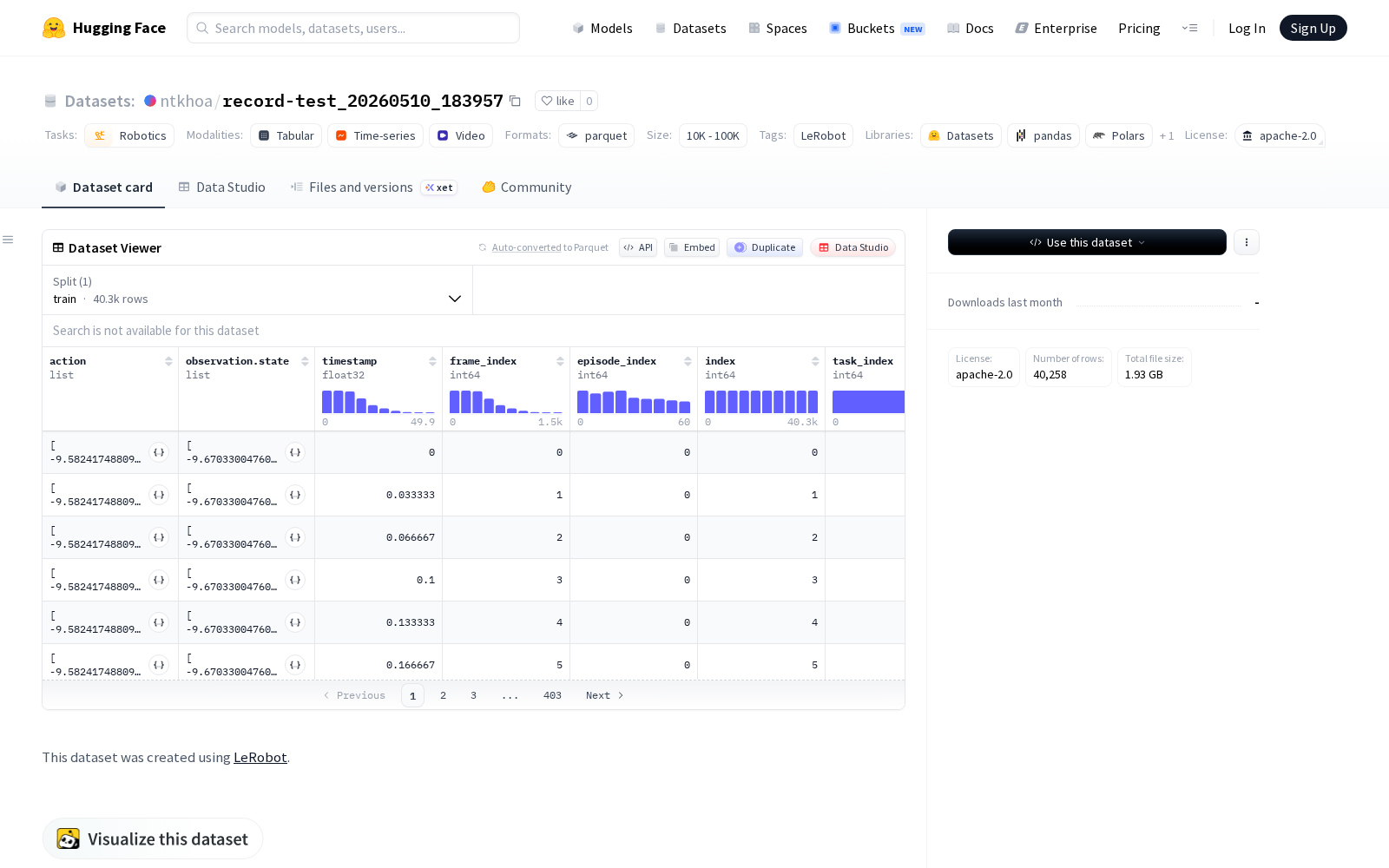
本次发布的数据集核心特征覆盖动作、观测状态、多视角图像、时间戳、多维度索引等多个维度,可满足多模态机器人算法的训练需求:其中动作与观测状态维度包含肩部平移、肩部提升、肘部弯曲、腕部弯曲、腕部旋转、夹持器位置六大核心运动参数,完整覆盖工业级六轴机械臂的所有核心运动控制维度,标注精度可支撑高精度运动轨迹规划类算法的训练要求;视觉维度包含分辨率为480x640的正面、侧面双视角同步采集视频,帧率达30fps,可实现视觉感知数据与运动执行数据的精准时序匹配,为端到端的视觉-运动融合算法研发提供数据支撑。
从数据集规模来看,该数据集总计包含61个完整运动片段、40258帧标注数据,对应1项标准化操作任务,结构化数据文件大小为100MB,配套视频文件大小为200MB,采集适配的机器人类型为so_follower,采用Apache 2.0开源许可证,支持全球开发者开展非商用及商用二次开发,无需额外授权。
从应用价值来看,该数据集可广泛应用于机器人运动控制、行为模仿两大核心研发方向:在运动控制领域,可支撑六轴机械臂的轨迹规划、精度优化、安全避障等算法的训练与测试;在行为模仿领域,可用于开发示教编程、人类动作复刻、协作机器人人机交互等功能,未来还可延伸至工业分拣、3C装配、服务机器人物品操作等人形及协作机器人的核心落地场景。
作为开源开放的垂直领域专项训练数据,该数据集的发布一方面填补了细分场景下机器人多模态运动数据集的供给缺口,降低了中小研发团队的算法训练数据获取成本;另一方面也符合当前全球AI训练数据要素开放共享的发展趋势,可推动机器人运动算法领域的开源协作,加速相关技术的落地迭代。
Dataset card内容:
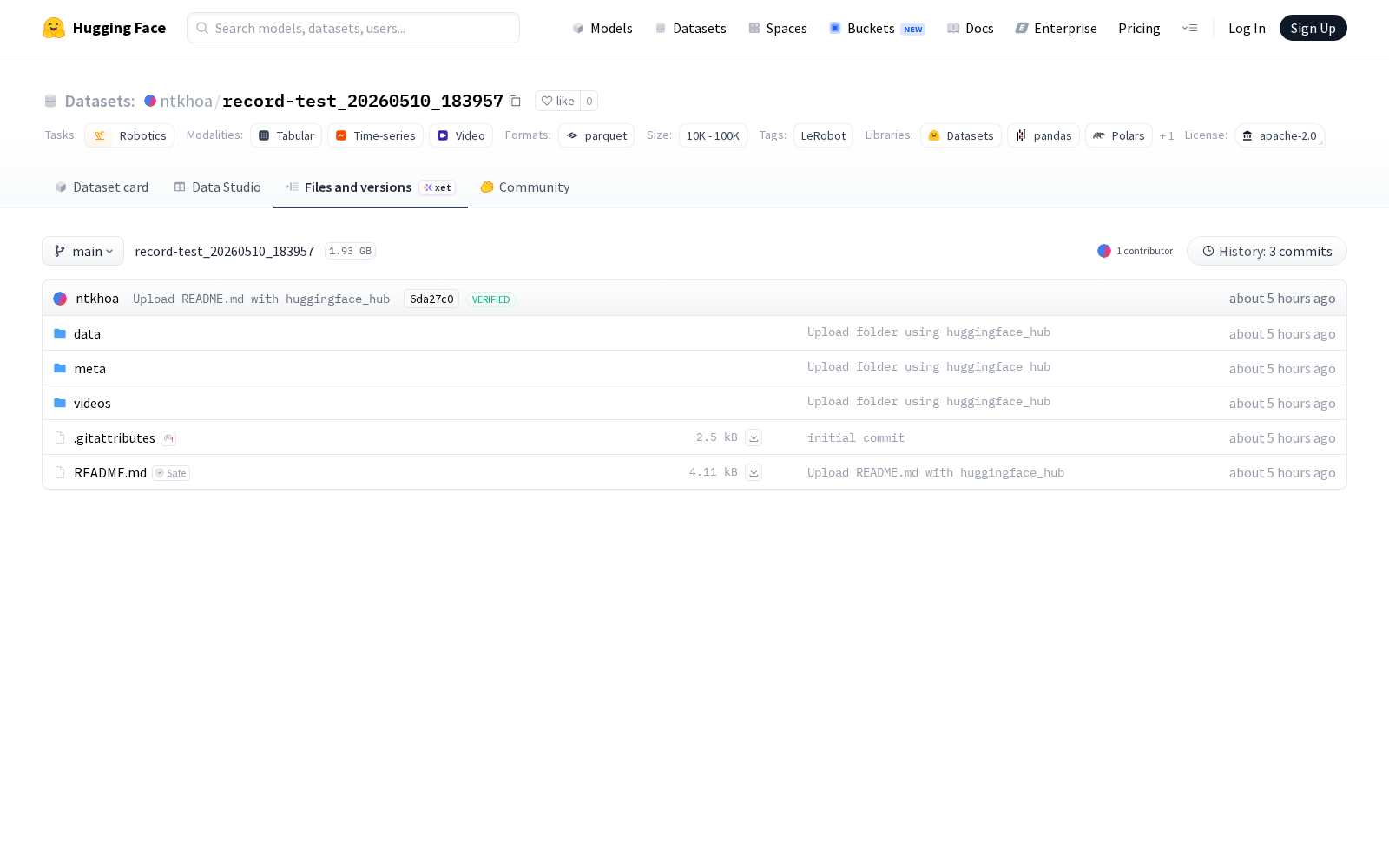
Files and versions内容:



_1769672084863.jpg)